In September of 2011, China officially joined the Great Powers in Space club, thanks to the deployment of their Tiangong-1 space station. Since then, this prototype station has served as a crewed orbital laboratory and an experimental testbed for future space stations. In the coming years, China hopes to build on the lessons learned with Tiangong-1 to create a larger, modular station in 2023 (similar to the International Space Station).
Though the station’s mission was originally meant to end in 2013, the China National Space Agency extended its service to 2016. By September of 2017, the Agency acknowledged that they had lost control of the station and indicated that it would fall to Earth later in the year. According to the latest updates from satellite trackers, Tianglong-1 is likely to be reentering our atmosphere in March of 2018.
Given the fact that the station measures 10 by 3.35 meters (32.8 by 11 ft), weighs a hefty 8,506 kg (18,753 lb) and was built from very durable construction materials, there are naturally concerns that some of it might survive reentry and reach the surface. But before anyone starts worrying about space debris falling on their heads, there are a few things that need to be addressed.
For starters, in the history of space flight, there has not been a single confirmed death caused by falling space debris. Tthanks to the development of modern tracking and early warning systems, we are also more prepared than at any time in our history for the threat of falling debris. Statistically speaking, you are more likely to be hit by falling airplane debris or eaten by a shark.
Second, the CNSA has emphasized that the reentry is very unlikely to pose a threat to commercial aviation or cause any impact damage on the surface. As Wu Ping – the deputy director of the manned space engineering office – indicated at a press conference back on September 14th, 2017: “Based on our calculation and analysis, most parts of the space lab will burn up during falling.”
In addition, The Aerospace Corporation, which is currently monitoring the reentry of Tiangong-1, recently released the results of their comprehensive analysis. Similar to what Wu stated, they indicated that most of the station will burn up on reentry, though they acknowledged that there is a chance that small bits of debris could survive and reach the surface. This debris would likely fall within a region that is centered along the orbital path of the station (i.e. around the equator).
To illustrate the zones of highest risk, they produced a map (shown below) which indicates where the debris would be most likely to land. Whereas the blue areas (that make up one-third of the Earth’s surface) indicate zones of zero probability, the green area indicates a zone of lower probability. The yellow areas, meanwhile, indicates zones that have a higher probability, which extend a few degrees south of 42.7° N and north of 42.7° S latitude, respectively.
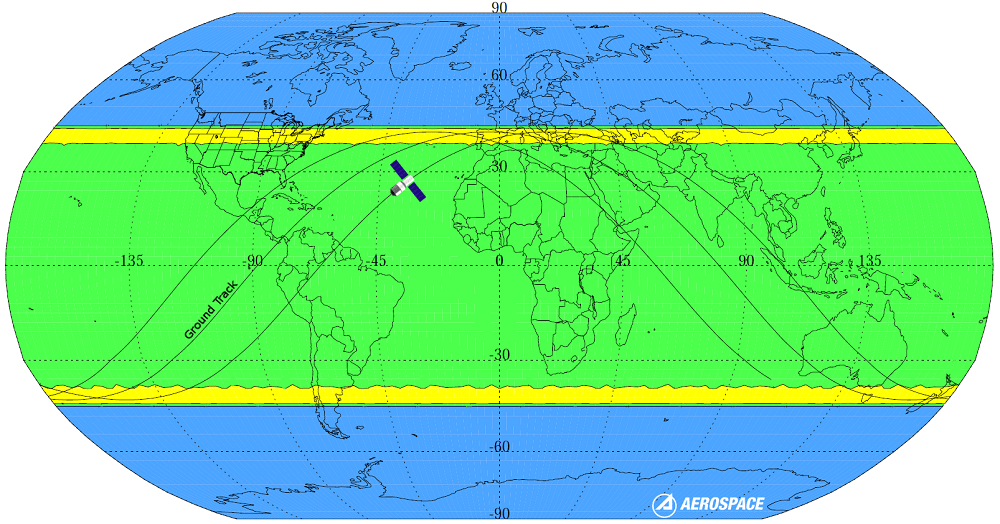
To add a little perspective to this analysis, the company also indicated the following:
“When considering the worst-case location (yellow regions of the map) the probability that a specific person (i.e., you) will be struck by Tiangong-1 debris is about one million times smaller than the odds of winning the Powerball jackpot. In the history of spaceflight, no known person has ever been harmed by reentering space debris. Only one person has ever been recorded as being hit by a piece of space debris and, fortunately, she was not injured.”
Last, but not least, the European Space Agency’s Inter Agency Space Debris Coordination Committee (IADC) will be monitoring the reentry. In fact, the IADC – which is made up of space debris and other experts from NASA, the ESA, JAXA, ISRO, KARI, Roscosmos and the China National Space Administration – will be using this opportunity to conduct a test campaign.
During this campaign, participants will combine their predictions of the reentry’s time window, which are based on respective tracking datasets obtained from radar and other sources. Ultimately, the purpose of the campaign is to improve prediction accuracy for all member states and space agencies. And so far, their predictions also indicate that there is little cause for concern.
As Holger Krag, the Head of ESA’s Space Debris Office, indicated in a press statement back in November:
“Owing to the geometry of the station’s orbit, we can already exclude the possibility that any fragments will fall over any spot further north than 43ºN or further south than 43ºS. This means that reentry may take place over any spot on Earth between these latitudes, which includes several European countries, for example. The date, time and geographic footprint of the reentry can only be predicted with large uncertainties. Even shortly before reentry, only a very large time and geographical window can be estimated.”

The ESA’s Space Debris Office – which is based at the European Space Operations Centre in Darmstadt, Germany – will follow this campaign in February with an international expert workshop. This workshop (which will run from February 28th to March 1st, 2018) will focus on reentry predictions and atmospheric break-up studies and allow experts in the field of space debris monitoring to share their latest findings and research.
In the current age of renewed space exploration and rapidly improving technology, every new development in space is an opportunity to test the latest instruments and methods. The reentry of Tiangong-1 is a perfect example, where the reentry of a space station is being used to test our ability to predict falling space debris. It also highlights the need for tracking and monitoring, given that humanity’s presence in orbit is only going to increase in the coming years.
In the meantime, it would not be inadvisable to keep your eyes on the skies this coming March. While there is little chance that debris will pose a hazard, it is sure to be spectacular sight for people who live closer to the equator!
Further Reading: Aerospace.org, ESA, Xinhuanet