Landing gear extended for Discovery touchdown at Smithsonian’s Udvar-Hazy Center. Credit: Ken Kremer
[/caption]
Space Shuttle Discovery took off from Florida on her final mission today atop a modified Boeing 747 Jumbo Jet, headed north and ultimately did a well earned victory lap over the US capitol before closing out her flying career and landing at nearby Dulles Airport and her permanent new museum home at the Smithsonian National Air and Space Museum’s Steven F. Udvar-Hazy Center in Chantilly, Virginia – where untold thousands and thousands gathered to witness together.
Throngs of onlookers lined the Florida Space Coast at the Kennedy Space Center to bid Discovery a tearful farewell from her home of nearly 30 highly productive years as she took off at the appointed hour of 7.a.m. EDT
Discovery flew 39 missions and delivered the incomparable and iconic Hubble Space Telescope into orbit.
Piggybacked Discovery approaches Smithsonian’s Udvar-Hazy Center on April 17, 2012. Credit: Ken Kremer
Many here and there were overwhelmingly sad that NASA’s shuttle program was prematurely cut short – barely a third of the way into the design lifetime and at the peak of performance for lack of political willpower and a small amount of federal funding, ceding US Leadership in Space.
Space Shuttle Discovery and 747 Shuttle Carrier Aircraft fly over the Smithsonian National Air and Space Museum's Steven F. Udvar-Hazy Center on April 17, 2012. The duo buzzed the US capitol region before finally landing at Dulles Airport. Credit: Ken Kremer
Barely two hours later – and ahead of schedule – NASA’s Fleet leading orbiter arrived in the skies over Washington, DC greeted by cheering crowds numbering in the tens to hundreds of thousands who had gathered all across the Capitol region to celebrate the stunning sight of a Space Shuttle Orbiter flying piggyback on a Jumbo Jet just a few hundred feet overhead.
The flight crew put on a dazzling and extended display of impressive flying ability buzzing over historic sites like the Washington Monument and the US Capitol, the National Harbor and everyday abodes. They circled around and around far more than advertised – to everyone’s delight.
Discovery set to fly over the giant crowd of many thousands gathered to welcome her to the Udvar-Havy Center on April 17, 2012. Credit: Ken Kremer
I was thrilled to watch the glorious sky show from the grounds of the Smithsonian’s Undar Hazy Center along with thousands of enthusiastic and cheering gawkers. Luckily I arrived early. Because within an hour, the parking lot was completely full and well beyond capacity several hours before the Museum’s official opening time.
Just a smidgen of the massive crowd at the Udvar-Havy Center on hand to cheer Discovery’s arrival. Credit: Ken Kremer
We witnessed four ultra close flyovers, including one directly overhead. Everyone was whooping and hollering. It was like a fun family fair, kids playing and jumping all over the place. And it sure seemed like some parents kept their kids home from school a few hours to witness one in a lifetime history
Finally the wheels and landing gear of the NASA 905 Shuttle Carrier Aircraft (SCA) were extended for final touchdown shortly after 11 a.m. – and a boisterous round of spontaneous applause erupted from the masses.
What a day of conflicting emotions – happy and sad, and absolutely not to be missed.
Discovery will next be hoisted off the SCA on Wednesday and then towed into her new abode on Thursday, April 19.
Stay tuned to Universe Today for continuing on-site coverage
Send Ken your flyover photos to post here at Universe Today.
At the Shuttle Landing Facility at NASA’s Kennedy Space Center in Florida, mating of space shuttle Discovery and the Shuttle Carrier Aircraft is complete in the mate-demate device nn April 15, 2012. Credit: NASA/Kim Shiflett
[/caption]
Following a busy weekend of work, Space Shuttle Discovery is now attached piggyback style to the Shuttle Carrier Aircraft (SCA) at NASA’s Kennedy Space Center and all set for the final flight to her ultimate resting place at the Smithsonian National Air and Space Museum’s Steven F. Udvar-Hazy Center in Virginia on Tuesday April 17. There she will reside on permanent display for the public just a short distance outside Washington D.C.
In the predawn hours on Saturday (April 14), Discovery was towed for the last time to the Mate- Demate Device (MDD) at the Shuttle Landing Facility and NASA’s specially outfitted Boeing 747 Jumbo Jet awaiting her in Florida. But howling winds in the subsequent hours delayed the hoist and mate on the back of the huge carrier plane.
Today (Sunday, April 15), the winds calmed and technicians raised Discovery and mechanically bolted her atop the SCA jet, designated NASA 905.
“It may have taken two days because of weather, but Discovery was attached to the Shuttle Carrier Aircraft today (April 15),” NASA KSC spokesman Allard Beutel told Universe Today after the mating operation was finished.
“And we’re on track to give Discovery a proper send off to its new home on Tuesday morning.”
NASA 905 will carry out all the remaining flights to ferry Space Shuttles Discovery, Enterprise and Endeavour to their permanent museum sites in Virginia, New York and California. The last remaining shuttle – Atlantis – will be towed later this year to her new home a few miles down the road at the Kennedy Space Center Visitor Complex.
Towing Discovery into the mate/demate device at the Shuttle Landing Facility at the Kennedy Space Center in Florida. Credit: NASA/Kim Shiflett
The initial mating of Discovery and the SCA in the mate/demate device was completed at about 11:15 a.m. EDT. The shuttle was finally secured to the carrier jet a few hours later on Sunday afternoon and will be backed out of the MDD on Monday, April 16.
NASA 905 will lift off at about 7 a.m. to ferry Discovery to the Washington Dulles International Airport in Virginia on April 17 with a planned arrival between 10 to 11 a.m. depending on weather.
If you spot the shuttle along the way, send Ken your photos to post here at Universe Today.
The SCA will fly over multiple locations from Washington, DC to the Udvar-Hazy Center as low as 1500 feet for the public to enjoy before finally landing at Dulles Airport.
Ken hopes to be on hand at the Udvar-Hazy Center for Universe Today
Discovery’s final departure from the Kennedy Space Center marks a bittersweet time for all who worked on the shuttle program as well as fans and advocates of space exploration across the globe.
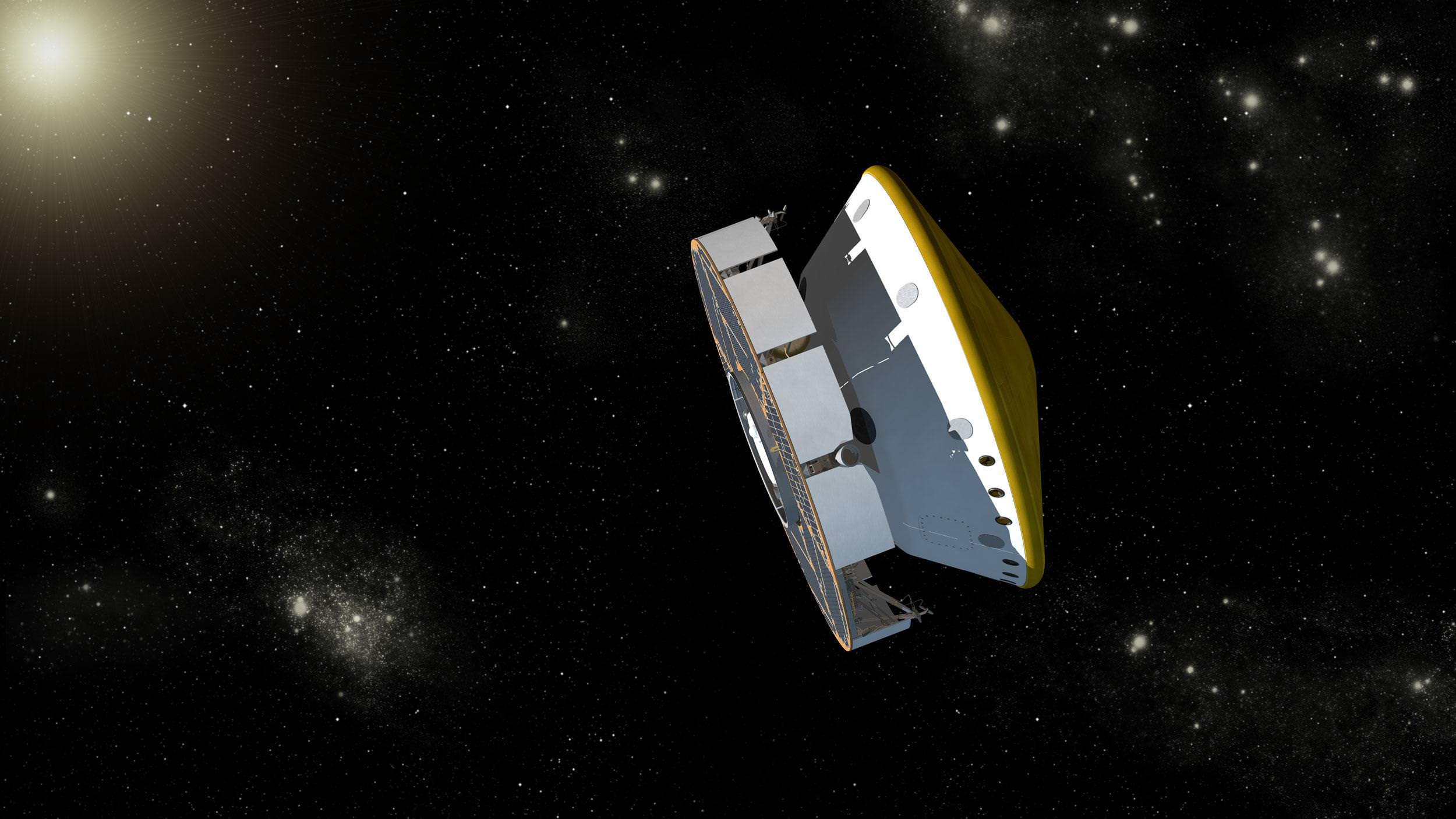
Curiosity Mars Science Laboratory (MSL) Spacecraft Cruising to Mars. Guided by the stars, Curiosity has reached the halfway point of its interplanetary cruise phase from the Earth to Mars in between launch on Nov. 26, 2011 and final approach in August 2012. MSL will use the stars to navigate. The spacecraft includes a disc-shaped solar powered cruise stage (on the left) attached to the aeroshell (right). Curiosity and the descent stage are tucked inside the aeroshell. Along the way to Mars, the cruise stage will perform six trajectory correction maneuvers (TCM’s) to adjust the spacecraft's path toward its final, precise landing site on Mars. Credit: NASA/JPL-Caltech
[/caption]
As of today, NASA’s car sized Curiosity rover has reached the halfway point in her 352 million mile (567 million km) journey to Mars – No fooling on April 1, 2012.
It’s T Minus 126 days until Curiosity smashes into the Martian atmosphere to brave the hellish “6 Minutes of Terror” – and, if all goes well, touch down inside Gale Crater at the foothills of a Martian mountain taller than the tallest in the continental United States – namely Mount Rainier.
Curiosity will search for the ingredients of life in the form of organic molecules – the carbon based molecules which are the building blocks of life as we know it. The one-ton behemoth is packed to the gills with 10 state of the art science instruments including a 7 foot long robotic arm, scoop, drill and laser rock zapper.
The Curiosity Mars Science laboratory (MSL) rover was launched from sunny Florida on Nov. 26, 2011 atop a powerful Atlas V rocket for an 8.5 month interplanetary cruise from the Earth to Mars and is on course to land on the Red Planet early in the morning of Aug. 6, 2012 EDT and Universal Time (or Aug. 5 PDT).
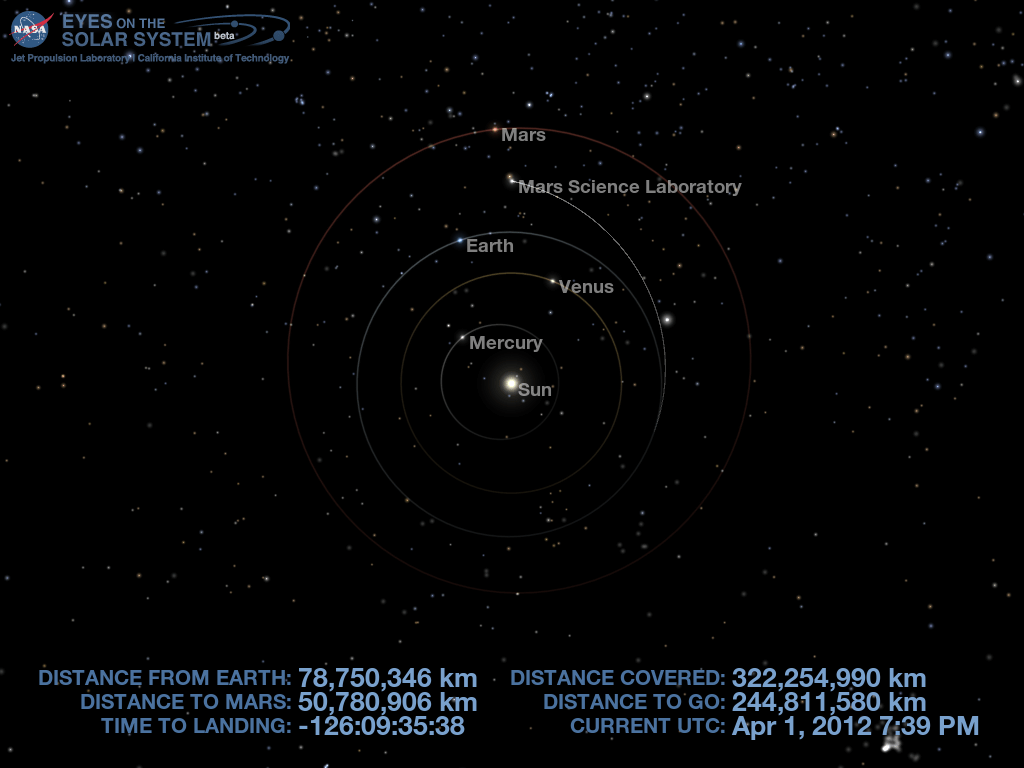
Curiosity’s Position in Space on April 1, 2012 - Halfway to Mars
This roadmap shows Curiosity's flight path through the Solar System - From Earth to Mars during the 8.5 month interplanetary cruise. Credit: NASA/JPL-Caltech
On March 26, engineers at NASA’s Jet Propulsion Laboratory, Pasadena, Calif., successfully ignited the spacecrafts thrusters for the second of six planned trajectory correction maneuvers (TCM’s) to adjust the robot’s flight path during the long journey to achieve a pinpoint landing beside the Martian mountain.
“It is satisfying to get the second maneuver under our belts and know we are headed in the right direction,” said JPL’s Erisa Hines, systems lead for the maneuver. “The cruise system continues to perform very well.”
This maneuver was one-seventh as much as the flight’s first course adjustment, on Jan. 11. The cruise stage is equipped with eight thrusters grouped into two sets of four that fire as the entire spacecraft spins at two rotations per minute. The thruster firings change the velocity of the spacecraft in two ways – along the direction of the axis of rotation and also perpendicular to the axis. Altogether there were more than 60 pulsing maneuvers spaced about 10 seconds apart.
“The purpose is to put us on a trajectory to the point in the Mars atmosphere where we need to be for a safe and accurate landing,” said Mau Wong, maneuver analyst at JPL.
Atlas V rocket and Curiosity Mars rover poised at Space Launch Complex 41 at Cape Canaveral, Florida prior to Nov. 26, 2011 liftoff. Credit: Ken Kremer
Marking another crucial milestone, the flight team has also powered up and checked the status of all 10 MSL science instruments – and all are nominal.
“The types of testing varied by instrument, and the series as whole takes us past the important milestone of confirming that all the instruments survived launch,” said Betina Pavri of NASA’s Jet Propulsion Laboratory, Pasadena, Calif., science payload test engineer for the mission. “These checkouts provide a valuable calibration and characterization opportunity for the instruments, including camera dark images and a measurement of zero pressure in the vacuum of space for the rover weather station’s pressure sensor.”
Ever since it was the first of MSL’s science instruments to be switched on three months ago, the Radiation Assessment Detector (RAD) has been collecting valuable measurements about the potentially lethal radiation environment in space and acting as a stunt double for determining the potential health effects on future human travelers to Mars.
RAD has been collecting data on the recent wave of extremely powerful solar flares erupting from the sun.
Curiosity has another 244 million kilometers to go over the next 4 months.
All hopes ride on Curiosity as America’s third and last generation of Mars rovers.
Devastating and nonsensical funding cuts to NASA’s Planetary Science budget have forced NASA to cancel participation in the 2018 ExoMars lander mission that had been joint planned with ESA, the European Space Agency. ESA now plans to forge ahead with Russian participation.
Stay tuned
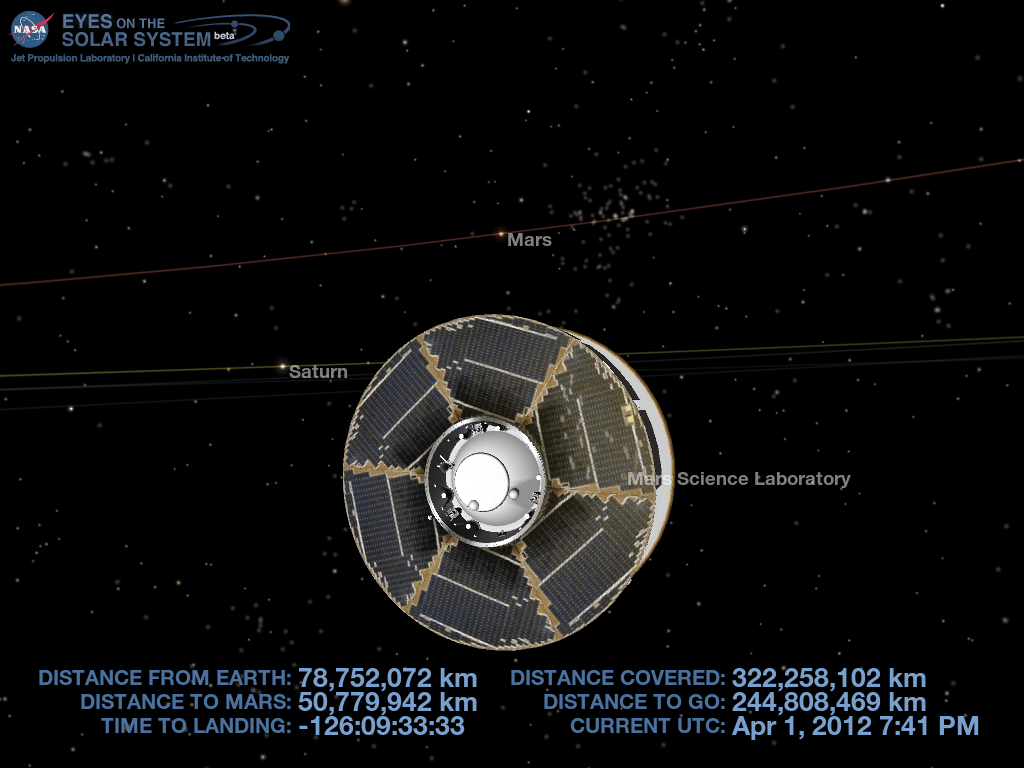
Simulated view to Mars over the shoulder of Curiosity on 1 April 2012 - from current location halfway to the Red Planet. Credit: NASA/JPL-Caltech
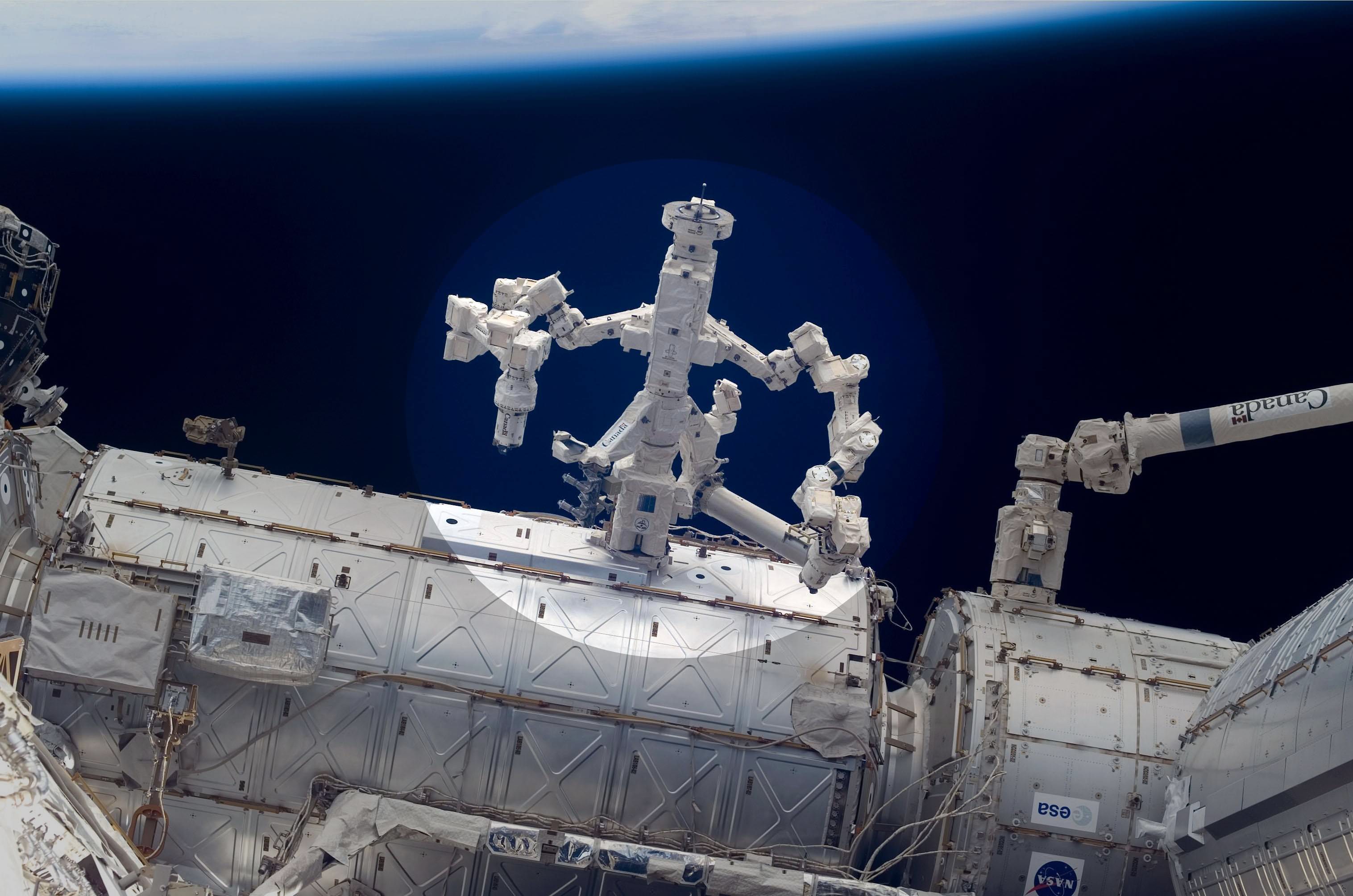
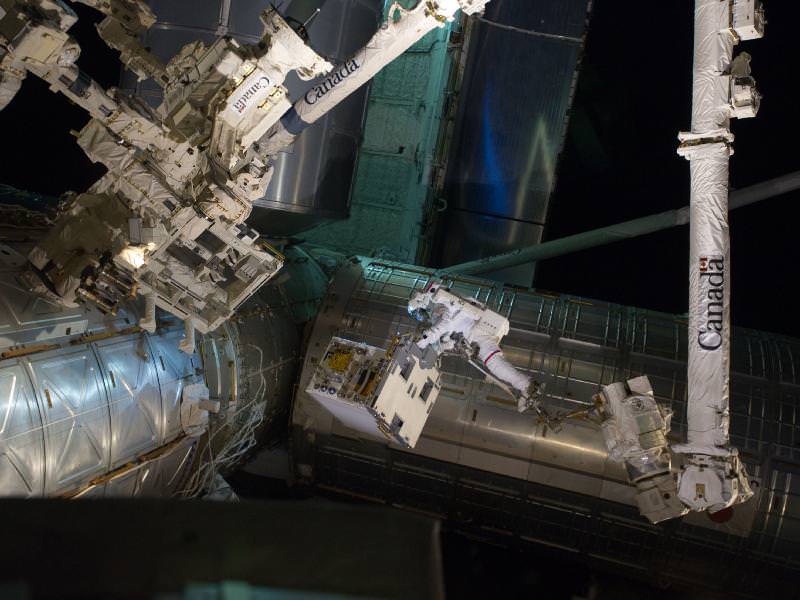
Canada’s Dextre robot (highlight) and NASA’s Robotic Refueling Experiment jointly performed groundbreaking robotics research aboard the ISS in March 2012. Dextre used its hands to grasp specialized work tools on the RRM for experiments to repair and refuel orbiting satellites. Credit: NASA
[/caption]
A combined team of American and Canadian engineers has taken a major first step forward by successfully applying new, first-of-its-kind robotics research conducted aboard the International Space Station (ISS) to the eventual repair and refueling of high value orbiting space satellites, and which has the potential to one day bring about billions of dollars in cost savings for the government and commercial space sectors.
Gleeful researchers from both nations shouted “Yeah !!!” – after successfully using the Robotic Refueling Mission (RRM) experiment – bolted outside the ISS- as a technology test bed to demonstrate that a remotely controlled robot in the vacuum of space could accomplish delicate work tasks requiring extremely precise motion control. The revolutionary robotics experiment could extend the usable operating life of satellites already in Earth orbit that were never even intended to be worked upon.
“After dedicating many months of professional and personal time to RRM, it was a great emotional rush and a reassurance for me to see the first video stream from an RRM tool,” said Justin Cassidy in an exclusive in-depth interview with Universe Today. Cassidy is RRM Hardware Manager at the NASA Goddard Spaceflight Center in Greenbelt, Maryland.
Astronuats Install Robotic Refueling Mission (RRM) experiment during Shuttle Era's Final Spacewalk
In March 2012, RRM and Canada’s Dextre Robot jointly acccomplised fundamental leap forward in robotics research aboard the ISS. Spacewalker Mike Fossum rides on the International Space Station's robotic arm as he carries the Robotic Refueling Mission experiment. This was the final scheduled spacewalk during a shuttle mission. Credit: NASA
And the RRM team already has plans to carry out even more ambitious follow on experiments starting as soon as this summer, including the highly anticipated transfer of fluids to simulate an actual satellite refueling that could transfigure robotics applications in space – see details below !
All of the robotic operations at the station were remotely controlled by flight controllers from the ground. The purpose of remote control and robotics is to free up the ISS human crew so they can work on other important activities and conduct science experiments requiring on-site human thought and intervention.
Dextre "hangs out" in space with two Robotic Refueling Mission (RRM) tools in its "hands." The RRM module is in the foreground. Credit: NASA
Over a three day period from March 7 to 9, engineers performed joint operations between NASA’s Robotic Refueling Mission (RRM) experiment and the Canadian Space Agency’s (CSA) robotic “handyman” – the Dextre robot. Dextre is officially dubbed the SPDM or Special Purpose Dexterous Manipulator.
On the first day, robotic operators on Earth remotely maneuvered the 12-foot (3.7 meter) long Dextre “handyman” to the RRM experiment using the space station’s Canadian built robotic arm (SSRMS).
Dextre’s “hand” – technically known as the “OTCM” – then grasped and inspected three different specialized satellite work tools housed inside the RRM unit . Comprehensive mechanical and electrical evaluations of the Safety Cap Tool, the Wire Cutter and Blanket Manipulation Tool, and the Multifunction Tool found that all three tools were functioning perfectly.
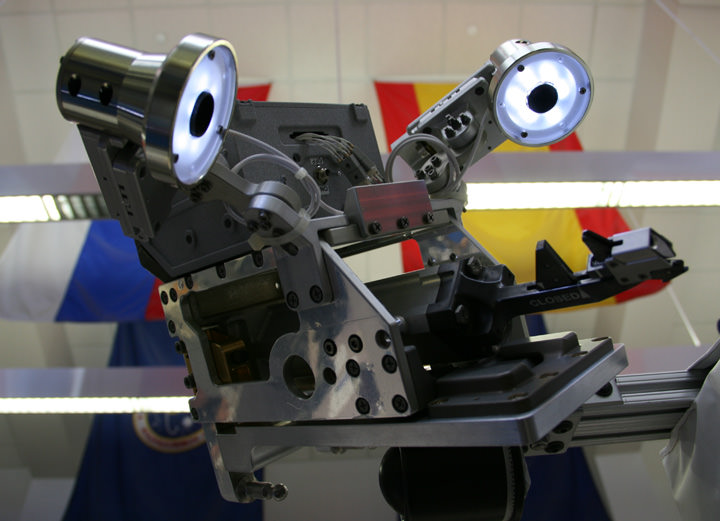
RRM Wire Cutter Tool (WCT) experiment is equipped with integral camera and LED lights -
on display at Kennedy Space Center Press Site. Dextre robot grasped the WCT with its hands and successfully snipped 2 ultra thin wires during the March 2012 RRM experiments. Credit: Ken Kremer
“Our teams mechanically latched the Canadian “Dextre” robot’s “hand” onto the RRM Safety Cap Tool (SCT). The RRM SCT is the first on orbit unit to use the video capability of the Dextre OTCM hand,” Cassidy explained.
“At the beginning of tool operations, mission controllers mechanically drove the OTCM’s electrical umbilical forward to mate it with the SCT’s integral electronics box. When the power was applied to that interface, our team was able to see that on Goddard’s large screen TVs – the SCT’s “first light” video showed a shot of the tool within the RRM stowage bay (see photo).
Shot of the Safety Cap Tool (SCT) tool within the RRM stowage bay. Credit NASA RRM
“Our team burst into a shout out of “Yeah!” to commend this successful electrical functional system checkout.”
Dextre then carried out assorted tasks aimed at testing how well a variety of representative gas fittings, valves, wires and seals located on the outside of the RRM module could be manipulated. It released safety launch locks and meticulously cut two extremely thin satellite lock wires – made of steel – and measuring just 20 thousandths of an inch (0.5 millimeter) in diameter.
“The wire cutting event was just minutes in duration. But both wire cutting tasks took approximately 6 hours of coordinated, safe robotic operations. The lock wire had been routed, twisted and tied on the ground at the interface of the Ambient Cap and T-Valve before flight,” said Cassidy.
This RRM exercise represents the first time that the Dextre robot was utilized for a technology research and development project on the ISS, a major expansion of its capabilities beyond those of robotic maintenance of the massive orbiting outpost.
Video Caption: Dextre’s Robotic Refueling Mission: Day 2. The second day of Dextre’s most demanding mission wrapped up successfully on March 8, 2012 as the robotic handyman completed his three assigned tasks. Credit: NASA/CSA
Wire Cutter Tool (WCT) Camera View of Ambient Cap Wire Cutting. Courtesy: Justin Cassidy to Universe Today. Credit NASA RRM
Altogether the three days of operations took about 43 hours, and proceeded somewhat faster than expected because they were as close to nominal as could be expected.
“Days 1 and 2 ran about 18 hours,” said Charles Bacon, the RRM Operations Lead/Systems Engineer at NASA Goddard, to Universe Today. “Day 3 ran approximately 7 hours since we finished all tasks early. All three days baselined 18 hours, with the team working in two shifts. So the time was as expected, and actually a little better since we finished early on the last day.”
Wire Cutter Tool (WCT) Camera View of T-Valve Wire Cutting. Courtesy: Justin Cassidy to Universe Today. Credit NASA RRM
“For the last several months, our team has been setting the stage for RRM on-orbit demonstrations,” Cassidy told me. “Just like a theater production, we have many engineers behind the scenes who have provided development support and continue to be a part of the on-orbit RRM operations.”
“At each stage of RRM—from preparation, delivery, installation and now the operations—I am taken aback by the immense efforts that many diverse teams have contributed to make RRM happen. The Satellite Servicing Capabilities Office at NASA’s Goddard Space Flight Center teamed with Johnson Space Center, Kennedy Space Center (KSC), Marshall Space Flight Center and the Canadian Space Agency control center in St. Hubert, Quebec to make RRM a reality.”
“The success of RRM operations to date on the International Space Station (ISS) using Dextre is a testament to the excellence of NASA’s many organizations and partners,” Cassidy explained.
The three day “Gas Fittings Removal task” was an initial simulation to practice techniques essential for robotically fixing malfunctioning satellites and refueling otherwise nominally operating satellites to extend to hopefully extend their performance lifetimes for several years.
Ground-based technicians use the fittings and valves to load all the essential fluids, gases and fuels into a satellites storage tanks prior to launch and which are then sealed, covered and normally never accessed again.
“The impact of the space station as a useful technology test bed cannot be overstated,” says Frank Cepollina, associate director of the Satellite Servicing Capabilities Office (SSCO) at NASA’s Goddard Space Flight Center in Greenbelt, Md.
“Fresh satellite-servicing technologies will be demonstrated in a real space environment within months instead of years. This is huge. It represents real progress in space technology advancement.”
Four more upcoming RRM experiments tentatively set for this year will demonstrate the ability of a remote-controlled robot to remove barriers and refuel empty satellite gas tanks in space thereby saving expensive hardware from prematurely joining the orbital junkyard.
The timing of future RRM operations can be challenging and depends on the availability of Dextre and the SSRMS arm which are also heavily booked for many other ongoing ISS operations such as spacewalks, maintenance activities and science experiments as well as berthing and/or unloading a steady stream of critical cargo resupply ships such as the Progress, ATV, HTV, Dragon and Cygnus.
Flexibility is key to all ISS operations. And although the station crew is not involved with RRM, their activities might be.
“While the crew itself does not rely on Dextre for their operations, Dextre ops can indirectly affect what the crew can or can’t do,” Bacon told me. “For example, during our RRM operations the crew cannot perform certain physical exercise activities because of how that motion could affect Dextre’s movement.”
Here is a list of forthcoming RRM operations – pending ISS schedule constraints:
Refueling (summer 2012) – After Dextre opens up a fuel valve that is similar to those commonly used on satellites today, it will transfer liquid ethanol into it through a sophisticated robotic fueling hose.
Thermal Blanket Manipulation (TBD 2012)- Dextre will practice slicing off thermal blanket tape and folding back a thermal blanket to reveal the contents underneath.
Electrical Cap Removal (TBD 2012)- Dextre will remove the caps that would typically cover a satellite’s electrical receptacle.
http://youtu.be/LboVN38ZdgU
RRM was carried to orbit inside the cargo bay of Space Shuttle Atlantis during July 2011 on the final shuttle mission (STS-135) of NASA’s three decade long shuttle program and then mounted on an external work platform on the ISS backbone truss by spacewalking astronauts. The project is a joint effort between NASA and CSA.
“This is what success is all about. With RRM, we are truly paving the way for future robotic exploration and satellite servicing,” Cassidy concluded. Full size Mock up of RRM box and experiment tool at KSC Press Site
Equipment Tool movements and manipulations by Dextre robot are simulated by NASA Goddard RRM manager Justin Cassidy. Credit: Ken Kremer
…….
March 24 (Sat): Free Lecture by Ken Kremer at the New Jersey Astronomical Association, Voorhees State Park, NJ at 830 PM. Topic: Atlantis, the End of Americas Shuttle Program, RRM, Orion, SpaceX, CST-100 and the Future of NASA Human & Robotic Spaceflight
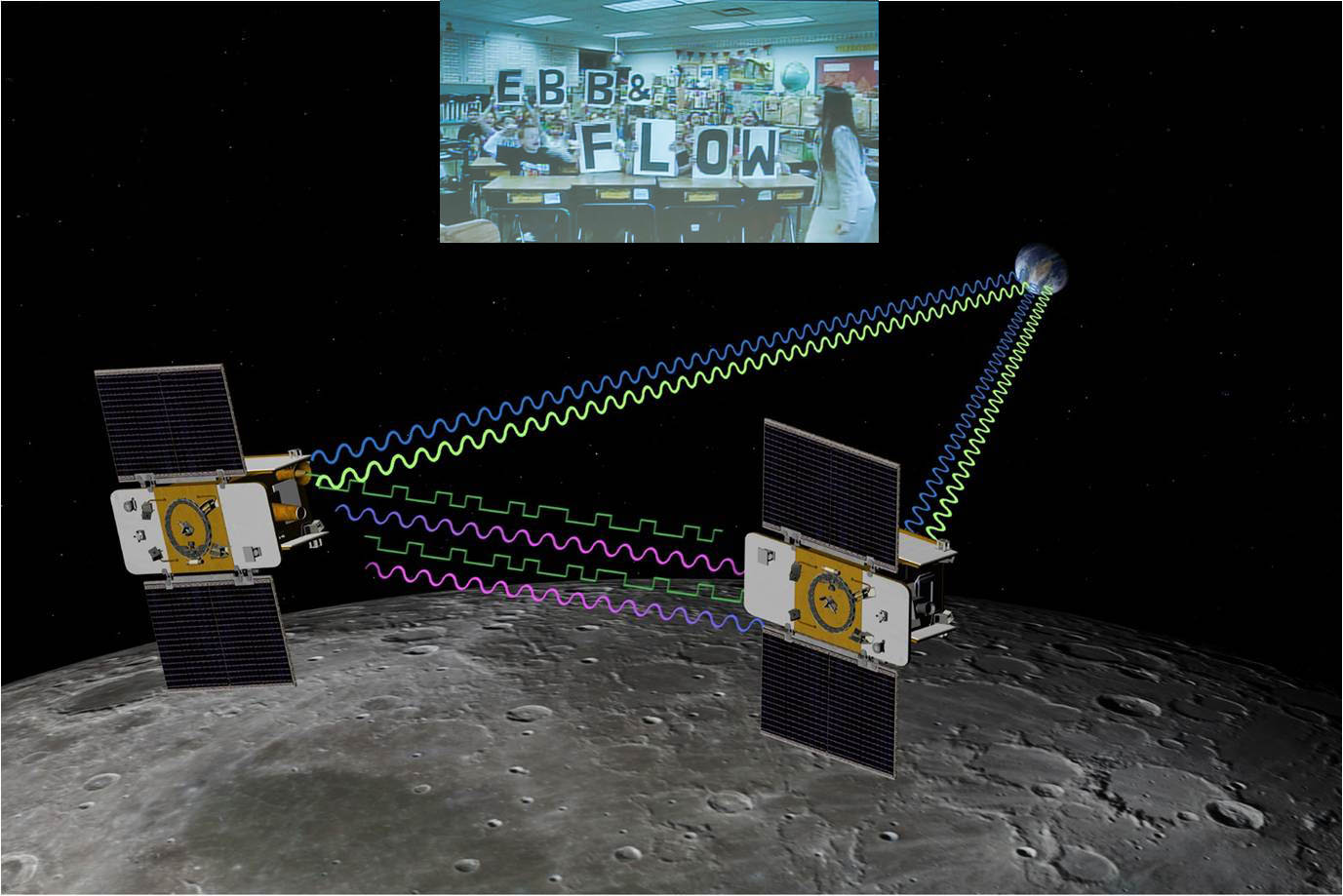
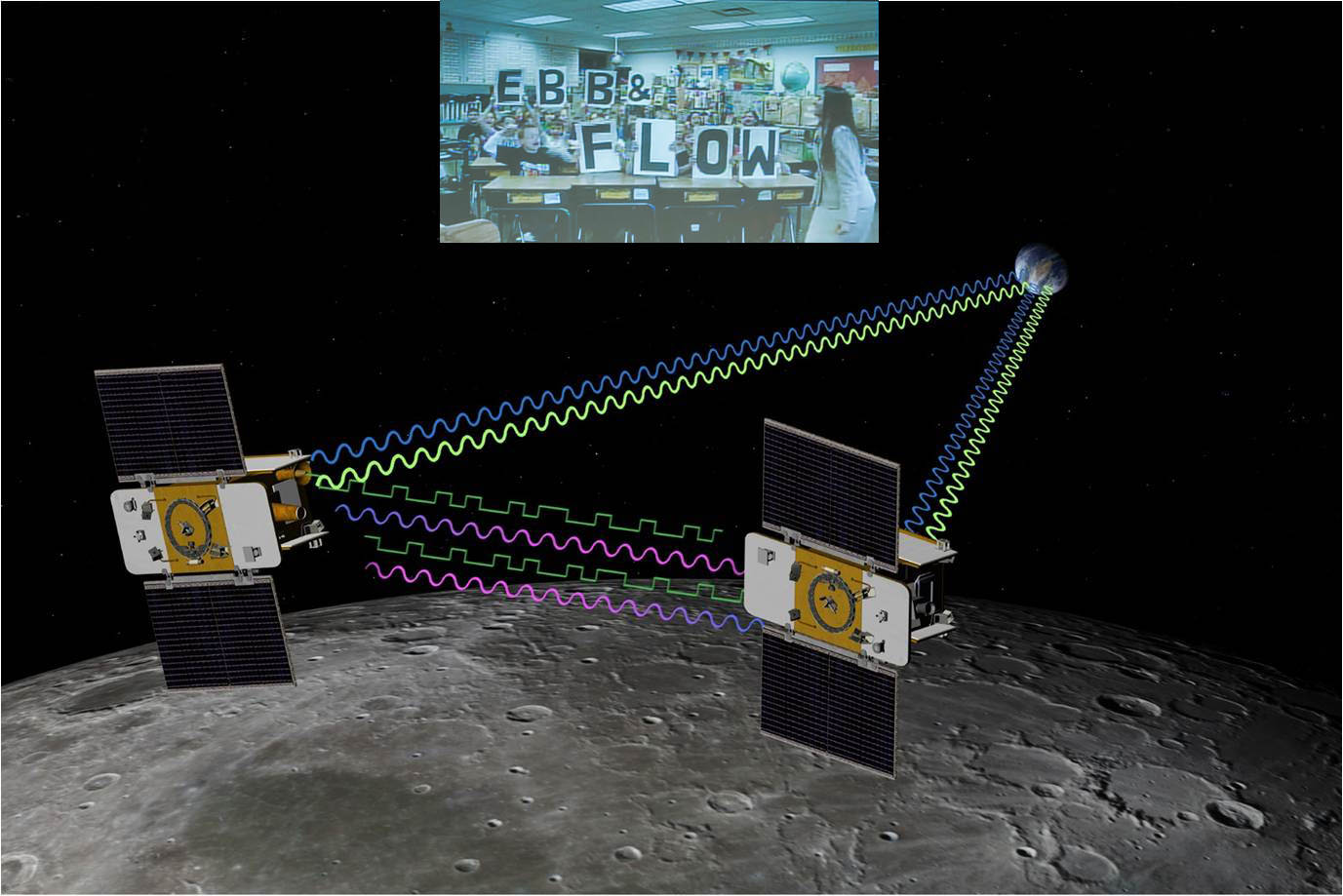
Student-run MoonKAM Imager Looks Homeward. This image of the far side of the lunar surface, with Earth in the background, was taken by the MoonKAM system board the Ebb spacecraft as part of the first image set taken from lunar orbit from March 15 – 18, 2012. A little more than half-way up and on the left side of the image is the crater De Forest. Due to its proximity to the southern pole, DeForest receives sunlight at an oblique angle when it is on the illuminated half of the Moon. NASA/Caltech-JPL/MIT/SRS
[/caption]
The first student selected photos of the Moon’s surface snapped by NASA’s new pair of student named Lunar Mapping orbiters – Ebb & Flow – have just been beamed back and show an eerie view looking back to the Home Planet – and all of Humanity – barely rising above the pockmarked terrain of the mysterious far side of our nearest neighbor in space.
Congratulations to Americas’ Youth on an outstanding and inspiring choice !!
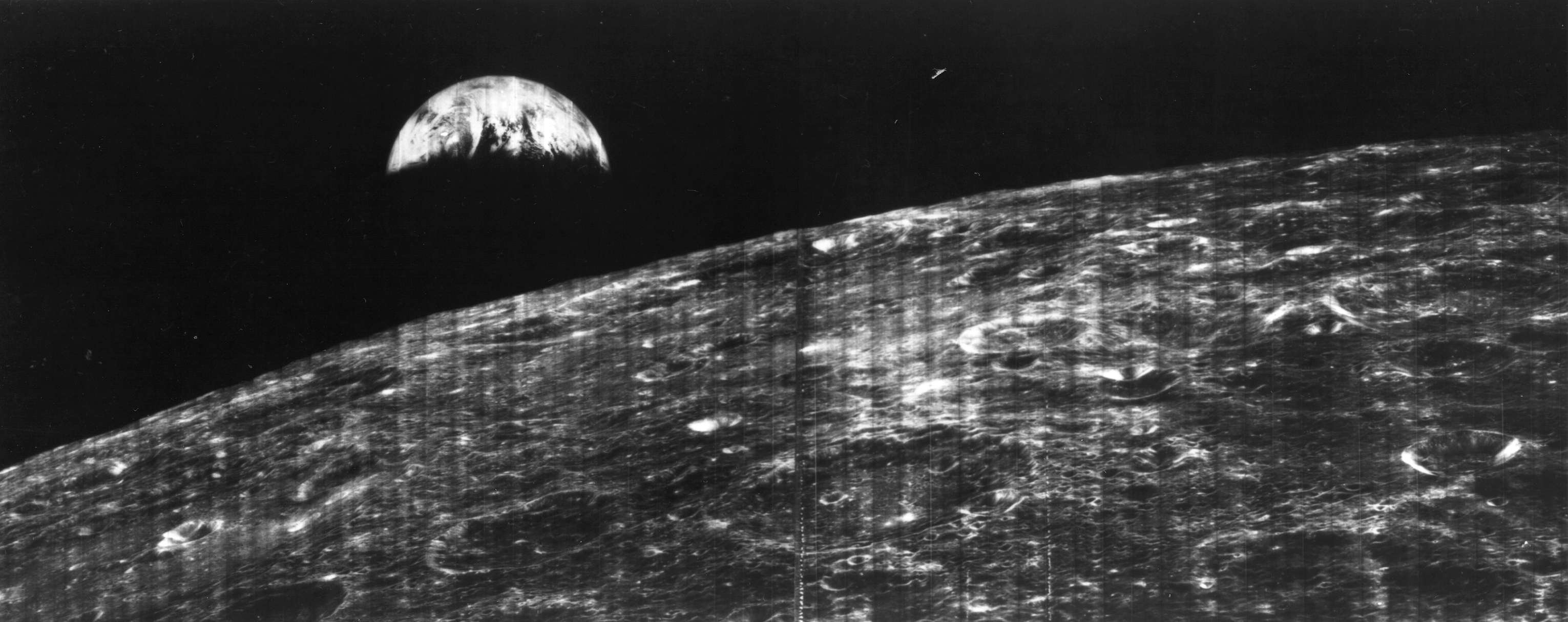
The student photo is reminiscent of one of the iconic images of Space Exploration – the first full view of the Earth from the Moon taken by NASA’s Lunar Orbiter 1 back in August 1966 (see below).
The images were taken in the past few days by the MoonKAM camera system aboard NASA’s twin GRAIL spacecraft currently circling overhead in polar lunar orbit, and previously known as GRAIL A and B. The formation-flying probes are soaring over the Moon’s north and south poles.
The nearly identical ships were rechristened as Ebb and Flow after Fourth grade students from the Emily Dickinson Elementary School in Bozeman, Mont., won the honor to rename both spacecraft by submitting the winning entries in a nationwide essay competition sponsored by NASA.
“The Bozeman 4th graders had the opportunity to target the first images soon after our science operations began,” said Maria Zuber, GRAIL principal investigator of the Massachusetts Institute of Technology in Cambridge, Mass., to Universe Today.
“It is impossible to overstate how thrilled and excited we are !”
The initial packet of some 66 student-requested digital images from the Bozeman kids were taken by the Ebb spacecraft from March 15-17 and downlinked to Earth March 20. They sure have lots of exciting classwork ahead analyzing all those lunar features !
“GRAIL’s science mapping phase officially began on March 6 and we are collecting science data,” Zuber stated.
Far Side of Moon Imaged by MoonKAM
This image of the lunar surface was taken by the MoonKAM system onboard NASA’s Ebb spacecraft on March 15, 2012. The 42.3-mile-wide (68-kilometer-wide) crater in the middle of the image (with the smaller crater inside) is Poinsot. Crater Poinsot, named for the French mathematician Louis Poinsot, is located on the northern part of the moon's far side. The target was selected by 4th grade students at Emily Dickinson Elementary School in Montana who had the honor of choosing the first MoonKAM images after winning a nationwide contest. NASA/Caltech-JPL/MIT/SRS
GRAIL’s science goal is to map our Moon’s gravity field to the highest precision ever. This will help deduce the deep interior composition, formation and evolution of the Moon and other rocky bodies such as Earth and also determine the nature of the Moon’s hidden core.
Engaging students and the public in science and space exploration plays a premier role in the GRAIL project. GRAIL is NASA’s first planetary mission to carry instruments – in the form of cameras – fully dedicated to education and public outreach.
Over 2,700 schools in 52 countries have signed up to participate in MoonKAM.
Ebb and Flow - New Names for the GRAIL Twins in Lunar Orbit
4th Grade Students from Bozeman, Montana (inset) won NASA’s contest to rename the GRAIL A and GRAIL B spacecraft and also chose the first lunar targets to be photographed by the onboard MoonKAM camera system. Artist concept of twin GRAIL spacecraft flying in tandem orbits around the Moon to measure its gravity field Credit: NASA/JPL -M ontage: Ken Kremer
5th to 8th grade students can send suggestions for lunar surface targets to the GRAIL MoonKAM Mission Operations Center at UC San Diego, Calif. Students will use the images to study lunar features such as craters, highlands, and maria while also learning about future landing sites.
NASA calls MoonKAM – “The Universe’s First Student-Run Planetary Camera”. MoonKAM means Moon Knowledge Acquired by Middle school students.
The MoonKAM project is managed by Dr Sally Ride, America’s first female astronaut.
“What might seem like just a cool activity for these kids may very well have a profound impact on their futures,” Ride said in a NASA statement. “The students really are excited about MoonKAM, and that translates into an excitement about science and engineering.”
“MoonKAM is based on the premise that if your average picture is worth a thousand words, then a picture from lunar orbit may be worth a classroom full of engineering and science degrees,” says Zuber. “Through MoonKAM, we have an opportunity to reach out to the next generation of scientists and engineers. It is great to see things off to such a positive start.”
MoonKAM image from NASA’s Ebb Lunar Mapping orbiter. This lunar target was selected by the 4th graders at Emily Dickinson Elementary School in Montana who won the contest to rename the GRAIL probes in a nationwide essay contest. NASA/Caltech-JPL/MIT/SRS
Altogether there are eight MoonKAM cameras aboard Ebb and Flow – one 50 mm lens and three 6 mm lenses. Each probe is the size of a washing machine and measures just over 3 feet in diameter and height.
Snapping the first images was delayed a few days by the recent series of powerful solar storms.
“Due to the extraordinary intensity of the storms we took the precaution of turning off the MoonKAMs until the solar flux dissipates a bit,” Zuber told me.
“GRAIL weathered the storm well. The spacecraft and instrument are healthy and we are continuing to collect science data.”
The washing-machine sized probes have been flying in tandem around the Moon since entering lunar orbit in back to back maneuvers over the New Year’s weekend. Engineers spent the past two months navigating the spaceship duo into lower, near-polar and near-circular orbits with an average altitude of 34 miles (55 kilometers) that are optimized for science data collection and simultaneously checking out the spacecraft systems.
Ebb and Flow were launched to the Moon on September 10, 2011 aboard a Delta II rocket from Cape Canaveral, Florida and took a circuitous 3.5 month low energy path to the moon to minimize the overall costs.
The Apollo astronauts reached the Moon in just 3 days. NASA’s next generation Orion space capsule currently under development will send American astronauts back to lunar orbit by 2021 or sooner.
NASA has just granted an extension to the GRAIL mission. Watch for my follow-up report detailing the expanded science goals of GRAIL’s extended lunar journey.
One of the first two remote images of Earth taken from the distance of the Moon on August 23, 1966 by NASA’s Lunar Orbiter 1 spacecraft. Credit: NASA
…….
March 24 (Sat): Free Lecture by Ken Kremer at the New Jersey Astronomical Association, Voorhees State Park, NJ at 830 PM. Topic: Atlantis, the End of Americas Shuttle Program, Orion, SpaceX, CST-100, Moon and the Future of NASA Human & Robotic Spaceflight
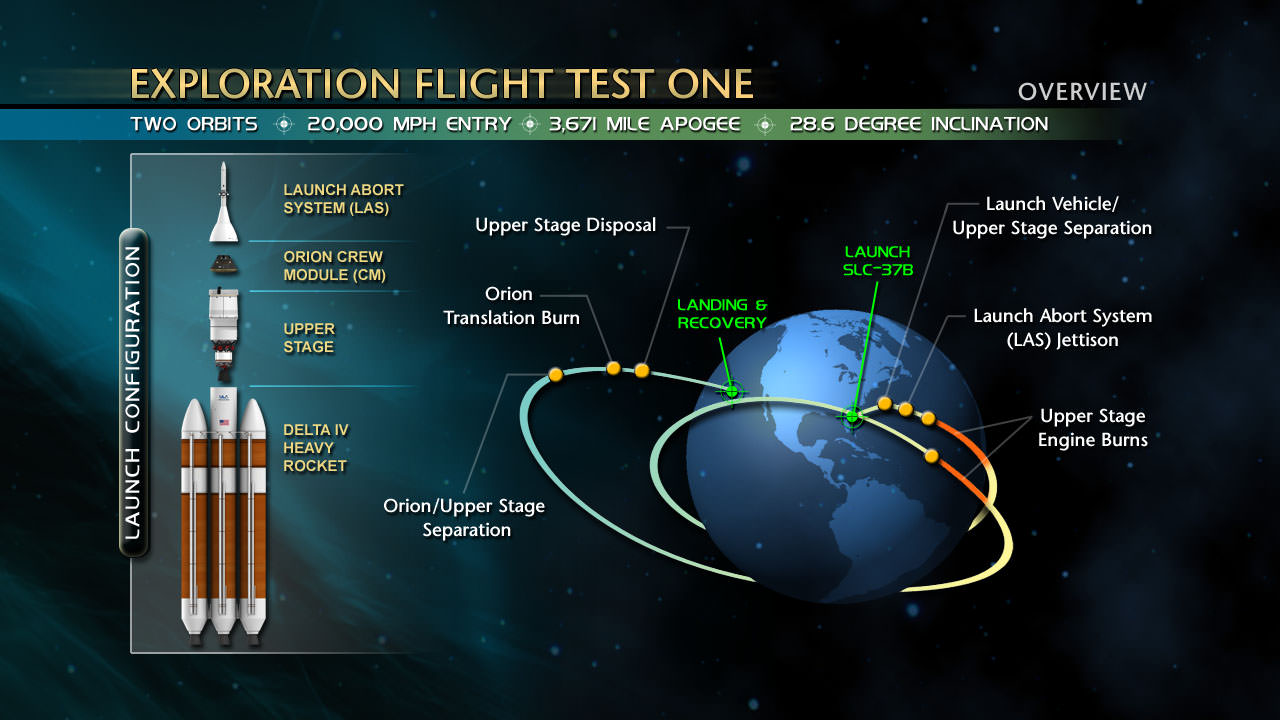
The Orion Exploration Flight Test-1 (EFT-1) is scheduled to launch the first unmanned Orion crew cabin into a high altitude Earth orbit in 2014 atop a Delta 4 Heavy rocket from Cape Canaveral, Florida. Artist’s concept. Credit: NASA
[/caption]
NASA is on course to make the highest leap in human spaceflight in nearly 4 decades when an unmanned Orion crew capsule blasts off from Cape Canaveral, Fla., on a high stakes, high altitude test flight in early 2014.
A new narrated animation (see below) released by NASA depicts the planned 2014 launch of the Orion spacecraft on the Exploration Flight Test-1 (EFT-1) mission to the highest altitude orbit reached by a spaceship intended for humans since the Apollo Moon landing Era.
Orion is NASA’s next generation human rated spacecraft and designed for missions to again take humans to destinations beyond low Earth orbit- to the Moon, Mars, Asteroids and Beyond to deep space.
Orion Video Caption – Orion: Exploration Flight Test-1 Animation (with narration by Jay Estes). This animation depicts the proposed test flight of the Orion spacecraft in 2014. Narration by Jay Estes, Deputy for flight test integration in the Orion program.
Lockheed Martin Space Systems is making steady progress constructing the Orion crew cabin that will launch atop a Delta 4 Heavy booster rocket on a two orbit test flight to an altitude of more than 3,600 miles and test the majority of Orion’s vital vehicle systems.
The capsule will then separate from the upper stage, re-enter Earth’s atmosphere at a speed exceeding 20,000 MPH, deploy a trio of huge parachutes and splashdown in the Pacific Ocean off the west coast of California.
Lockheed Martin is responsible for conducting the critical EFT-1 flight under contract to NASA.
Orion will reach an altitude 15 times higher than the International Space Station (ISS) circling in low orbit some 250 miles above Earth and provide highly valuable in-flight engineering data that will be crucial for continued development of the spaceship.
Orion Exploration Flight Test One Overview. Credit: NASA
“This flight test is a challenge. It will be difficult. We have a lot of confidence in our design, but we are certain that we will find out things we do not know,” said NASA’s Orion Program Manager Mark Geyer.
“Having the opportunity to do that early in our development is invaluable, because it will allow us to make adjustments now and address them much more efficiently than if we find changes are needed later. Our measure of success for this test will be in how we apply all of those lessons as we move forward.”
Lockheed Martin is nearing completion of the initial assembly of the Orion EFT-1 capsule at NASA’s historic Michoud Assembly Facility (MAF) in New Orleans, which for three decades built all of the huge External Fuel Tanks for the NASA’s Space Shuttle program.
In May, the Orion will be shipped to the Kennedy Space Center in Florida for final assembly and eventual integration atop the Delta 4 Heavy rocket booster and launch from Space Launch Complex 37 at nearby Cape Canaveral. The Delta 4 is built by United Launch Alliance.
The first integrated launch of an uncrewed Orion is scheduled for 2017 on the first flight of NASA’s new heavy lift rocket, the SLS or Space Launch System that will replace the now retired Space Shuttle orbiters
Continued progress on Orion, the SLS and all other NASA programs – manned and unmanned – is fully dependent on the funding level of NASA’s budget which has been significantly slashed by political leaders of both parties in Washington, DC in recent years.
…….
March 24 (Sat): Free Lecture by Ken Kremer at the New Jersey Astronomical Association, Voorhees State Park, NJ at 830 PM. Topic: Atlantis, the End of Americas Shuttle Program, Orion, SpaceX, CST-100 and the Future of NASA Human & Robotic Spaceflight
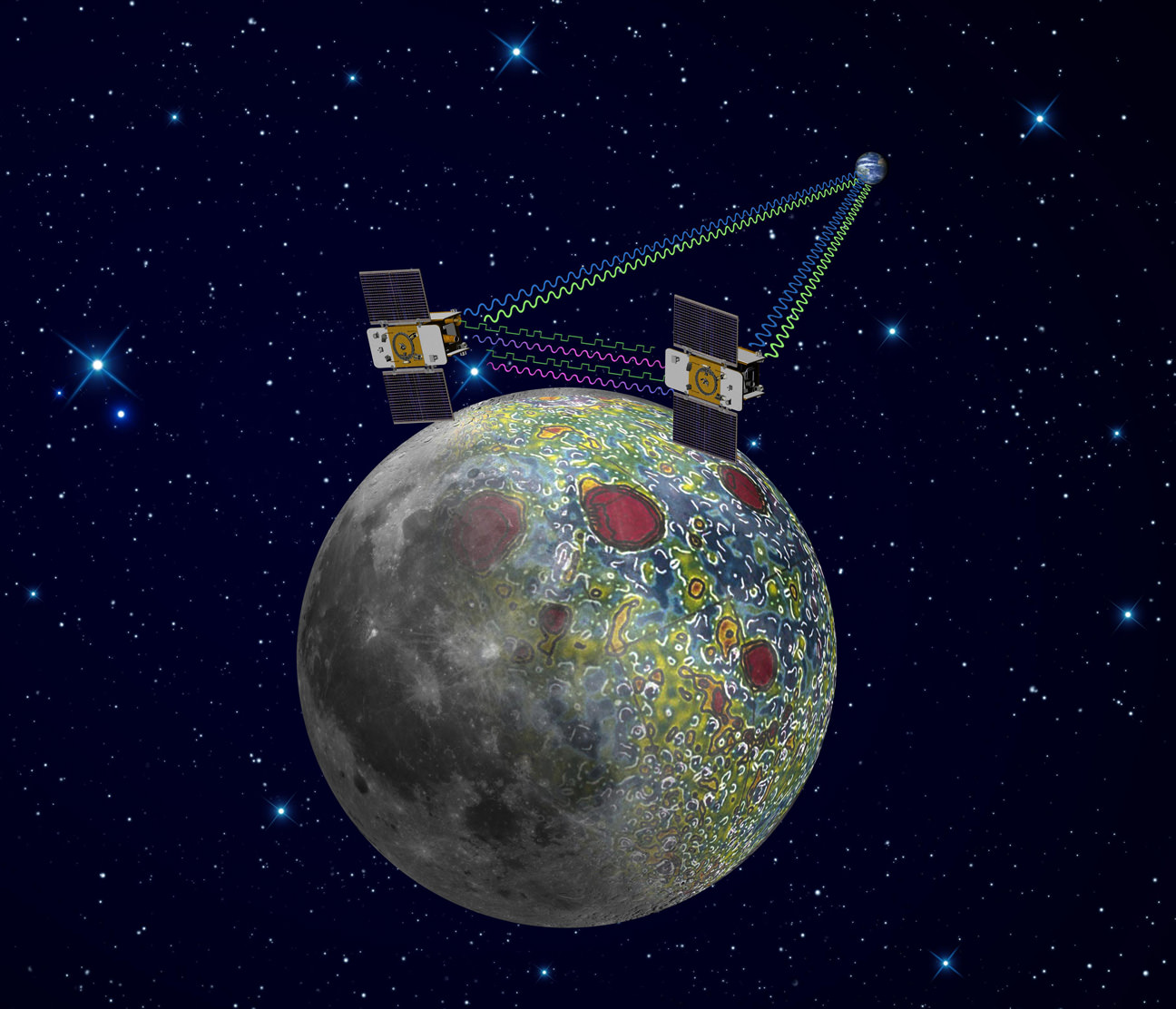
Twin GRAIL Lunar Probes Ebb and Flow Start Lunar Gravity Science. GRAIL probes use precision formation-flying technique to map Lunar Gravity, as depicted in this artist's rendering. Radio signals traveling between the two spacecraft provide scientists with exact measurements which will result in the most accurate gravity map of the moon ever made. Credit: NASA/JPL-Caltech
[/caption]
NASA’s twin lunar orbiting GRAIL (Gravity Recovery and Interior Laboratory) spacecraft christened Ebb and Flow have kicked off their science collection phase aimed at precisely mapping our Moon’s gravity field, interior composition and evolution, the science team informed Universe Today.
“GRAIL’s science mapping phase officially began Tuesday (March 6) and we are collecting science data,” said Maria Zuber, GRAIL principal investigator of the Massachusetts Institute of Technology in Cambridge, to Universe Today.
“It is impossible to overstate how thrilled and excited we are !”
“The data appear to be of excellent quality,” Zuber told me.
GRAIL’s goal is to provide researchers with a better understanding of how the Moon, Earth and other rocky planets in the solar system formed and evolved over its 4.5 billion years of history.
NASA’s Dawn spacecraft is currently mapping the gravity field of Asteroid Vesta in high resolution from low orbit.
Despite more than 100 missions to the Moon there is still a lot we don’t know about the Moon says Zuber, like why the near side is flooded with magma and smooth and the back side is rough, not smooth and completely different.
South pole of the far side of the moon as seen as seen in this 1st image from the MoonKAM camera aboard GRAIL mission’s Ebb spacecraft. Credit: NASA/JPL-Caltech
The formation-flying spacecraft will make detailed science measurements from lunar orbit with unparalleled precision to within 1 micron – the width of a human red blood cell – by transmitting Ka-band radio signals between each other and Earth to help unlock the mysteries of the Moon’s deep interior.
“We’ve worked on calibrating the alignment of the Ka-band antennae to establish the optimal alignment. We’ve verified the data pipeline and are spending a lot of time working with the raw data to make sure that we understand its intricacies,” Zuber explained.
The washing-machine sized probes have been flying in tandem around the Moon since entering lunar orbit in back to back maneuvers over the New Year’s weekend. Engineers have spent the past two months navigating the spaceship duo into lower, near-polar and near-circular orbits with an average altitude of 34 miles (55 kilometers), that are optimized for science data collection, and simultaneously checking out the spacecraft systems.
GRAIL A and B gravity mappers rocket to the moon atop a Delta II Heavy booster on Sept. 10 from Cape Canaveral, Florida. View to Space Launch Complex 17 gantry from Press Site 1. Credit: Ken Kremer
Ebb and Flow were launched to the Moon on September 10, 2011 aboard a Delta II rocket from Cape Canaveral, Florida and took a circuitous 3.5 month low energy path to the moon to minimize the overall costs. The Apollo astronauts reached the Moon in just 3 days.
I asked Zuber to describe the team’s activities putting the mirror image probes to work peering to the central core of our nearest neighbor in unprecedented detail.
“Last Wednesday (Feb. 29) we achieved the science orbit and on Thursday (March 1) we turned the spacecraft to ‘orbiter point’ configuration to test the instrument and to monitor temperatures and power.”
“When we turned on the instrument we established the satellite-to-satellite radio link immediately. All vital signs were nominal so we left the spacecraft in orbiter point configuration and have been collecting science data since then. At the same time, we’ve continued performing calibrations and monitoring spacecraft and instrument performance, such as temperatures, power, currents, voltages, etc., and all is well,” said Zuber.
Measurements gathered over the next 84 days will be used to create high-resolution maps of the Moon’s near side and far side gravitational fields that are 100 to 1000 times more precise than ever before and that will enable researchers to deduce the internal structure and composition of our nearest neighbor from the outer surface crust down to the deep hidden core.
As one satellite follows the other, in the same orbit, they will perform high precision range-rate measurements to precisely measure the changing distance between each other. As they fly over areas of greater and lesser gravity caused by visible features such as mountains, craters and masses hidden beneath the lunar surface, the distance between the two spacecraft will change slightly.
“GRAIL is great. Everything is in place to get science data now,” said Sami Asmar, a GRAIL co-investigator from NASA’s Jet Propulsion Lab in Pasadena, Calif. “Soon we’ll get a very high resolution and global gravity map of the Moon.”
The data collected will be translated into gravitational field maps of the Moon that will help unravel information about the makeup of the Moon’s core and interior composition.
GRAIL will gather three complete gravity maps over the three month mission which is expected to conclude around May 29. If the probes survive a solar eclipse in June and if NASA funding is available, then they may get a bonus 3 month extended mission.
Ebb and Flow - New Names for the GRAIL Twins in Lunar Orbit
4th Grade Students from Montana (inset) win NASA’s contest to rename the GRAIL A and GRAIL B spacecraft. Artist concept of twin GRAIL spacecraft flying in tandem orbits around the Moon to measure its gravity field Credit: NASA/JPL Montage: Ken Kremer
NASA sponsored a nation-wide student contest for America’s Youth to choose new names for the twin probes originally known as GRAIL A and GRAIL B. 4th graders from the Emily Dickinson Elementary School in Bozeman, Montana submitted the winning entries -Ebb and Flow. The new names won because they astutely describe the probes movements in orbit to collect the science data.
The GRAIL twins are also equipped with a very special camera dubbed MoonKAM (Moon Knowledge Acquired by Middle school students) whose purpose is to inspire kids to study science.
By having their names selected, the 4th graders from Emily Dickinson Elementary have also won the prize to choose the first target on the Moon to photograph with the MoonKAM cameras, which are managed by Dr Sally Ride, America’s first female astronaut.
“MoonKAMs on both Ebb and Flow were turned on Monday, March 5, and all appears well, Zuber said. “The Bozeman 4th graders will have the opportunity to target the first images a week after our science operations begin.”
Artist rendition of NASA’s Mars InSight (Interior exploration using Seismic Investigations, Geodesy and Heat Transport) Lander. InSight is based on the proven Phoenix Mars spacecraft and lander design with state-of-the-art avionics from the Mars Reconnaissance Orbiter (MRO) and Gravity Recovery and Interior Laboratory (GRAIL) missions. Credit: JPL/NASA
[/caption]
A Phoenix-like lander that would mine the deepest hole yet into Mars– to a depth of 5 meters – and unveil the nature of the mysterious deep interior and central core of the Red Planet is under consideration by NASA for a 2016 launch and sports a nifty new name – InSight.
The stationary “InSight” lander would be an international science mission and a near duplicate of NASA’s proven Phoenix spacecraft, Bruce Banerdt told Universe Today. Banerdt is the Principal Investigator of the proposed InSight mission.
“InSight is essentially built from scratch, but nearly build-to-print from the Phoenix design,” Banerdt, of NASA’s Jet Propulsion Laboratory (JPL) in Pasadena , Calif, told me. The team can keep costs down by re-using the blueprints pioneered by Phoenix instead of creating an entirely new spacecraft.
“The robotic arm is similar (but not identical) to the Phoenix arm.”
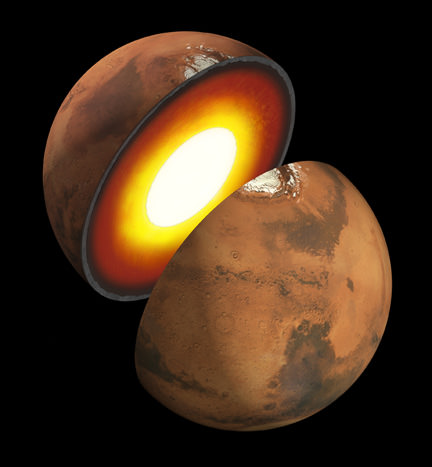
Mars Interior
Insight’s goal is to investigate and deduce the nature of the interior of the Red Planet. Credit: JPL/NASA
However, the landing site and science goals for InSight are quite different from Phoenix.
InSight will have an entirely new suite of three science instruments, including two from Europe, designed to peer to the center of Mars and detect the fingerprints of the processes by which the terrestrial planets formed. It will determine if there is any seismic activity, the amount of heat flow from the interior, the size of Mars core and whether the core is liquid or solid.
NASA’s twin GRAIL lunar gravity probes are set to begin their own investigation into the interior and core of Earth’s Moon in early March 2012, and several science team members are common to GRAIL and InSight.
“The seismometer (SEIS, stands for Seismic Experiment for Interior Structure) is from France (built by CNES and IPGP) and the heat flow probe (HP3, stands for Heat flow and Physical Properties Probe) is from Germany (built by DLR),” Banerdt explained.
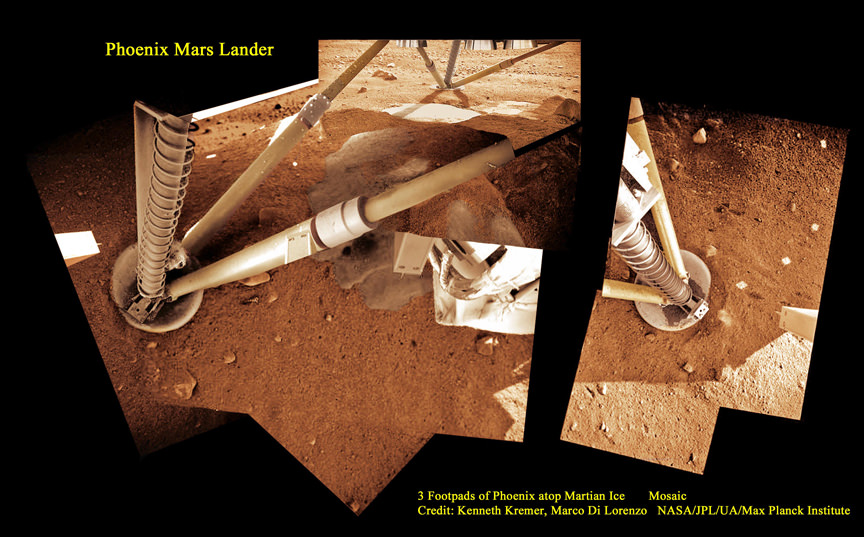
Phoenix successfully landed in the frigid northern polar regions of Mars in 2008 in search of potential habitats for life and quickly discovered water ice and salty soils that could be favorable for the genesis and support of extraterrestrial life.
3 Footpads of Phoenix Mars Lander atop Martian Ice
Phoenix thrusters blasted away Martian soil and exposed water ice. Proposed Mars InSight mission will build a new Phoenix-like lander from scratch to peer deep into the Red Planet and investigate the nature and size of the mysterious Martian core. Credit: Kenneth Kremer, Marco Di Lorenzo, Phoenix Mission, NASA/JPL/UA/Max Planck Institute
InSight will intentionally land in a far warmer and sunnier location nearer the moderate climate of the equator to enable a projected lifetime of 2 years (or 1 Mars year) vs. the 5 months survival of Phoenix extremely harsh arctic touchdown zone.
“Our planned landing site is in Elysium Planitia,” Banerdt told me. “It was chosen for optimizing engineering safety margins for landing and power.”
The more equatorial landing site affords far more sun for the life giving solar arrays to power the instruments and electronics.
“We have global objectives and can do our science anywhere on the planet.”
Elysium Planitia is not too far from the landing sites of the Spirit and Curiosity rovers. The Elysium Mons volcano is also in the general area, but it’s a long way from precise site selection.
InSight is a geophysical lander targeted to delve deep beneath the surface into the Martian interior, check its “vital signs”; like “pulse” though seismology, “temperature”, though a heat flow probe, and “reflexes”, through precision tracking.
The purpose is to answer one of science’s most fundamental questions: How were the planets created?
InSight will accomplish much of its science investigations through experiments sitting directly in contact with the Martian surface. The robotic arm will pluck two of the instruments from the lander deck and place them onto Mars.
“The arm will pick the SEIS seismometer and HP3 heat flow probe off the deck and place each on the ground next to the lander. The arm doesn’t have a drill, but the heat flow probe itself will burrow down as deep as 5 meters,” Banerdt elaborated.
The third experiment named RISE (Rotation and Interior Structure Experiment) is to be provided by JPL and will use the spacecraft communication system to provide precise measurements of Mars planetary rotation and elucidate clues to its interior structure and composition.
Right now on Mars, NASA’s Opportunity rover is conducting a Doppler radio tracking experiment similar to what is planned for RISE, but InSight will have a big advantage according to Banerdt.
“The RISE experiment will be very similar to what we are doing right now on Opportunity, but will be able to do much better, said Banerdt. “The differences are that we will get more tracking every week (Opportunity is power-limited during the winter months; that’s why she is currently stationary!) and will make measurements for an entire Mars year – we will likely only get a handful of months from Opportunity.”
Insight will also be equipped with 2 cameras and make some weather measurements.
“We have a camera on the arm and one fixed to the deck, both primarily to support placing the instruments on the surface, although they will be able to scan the landscape around the spacecraft. Both are Black & White,” Banerdt told me.
“We will measure pressure, temperature and wind, mostly to support noise analysis on the seismic data, but will also supply information on the weather.”
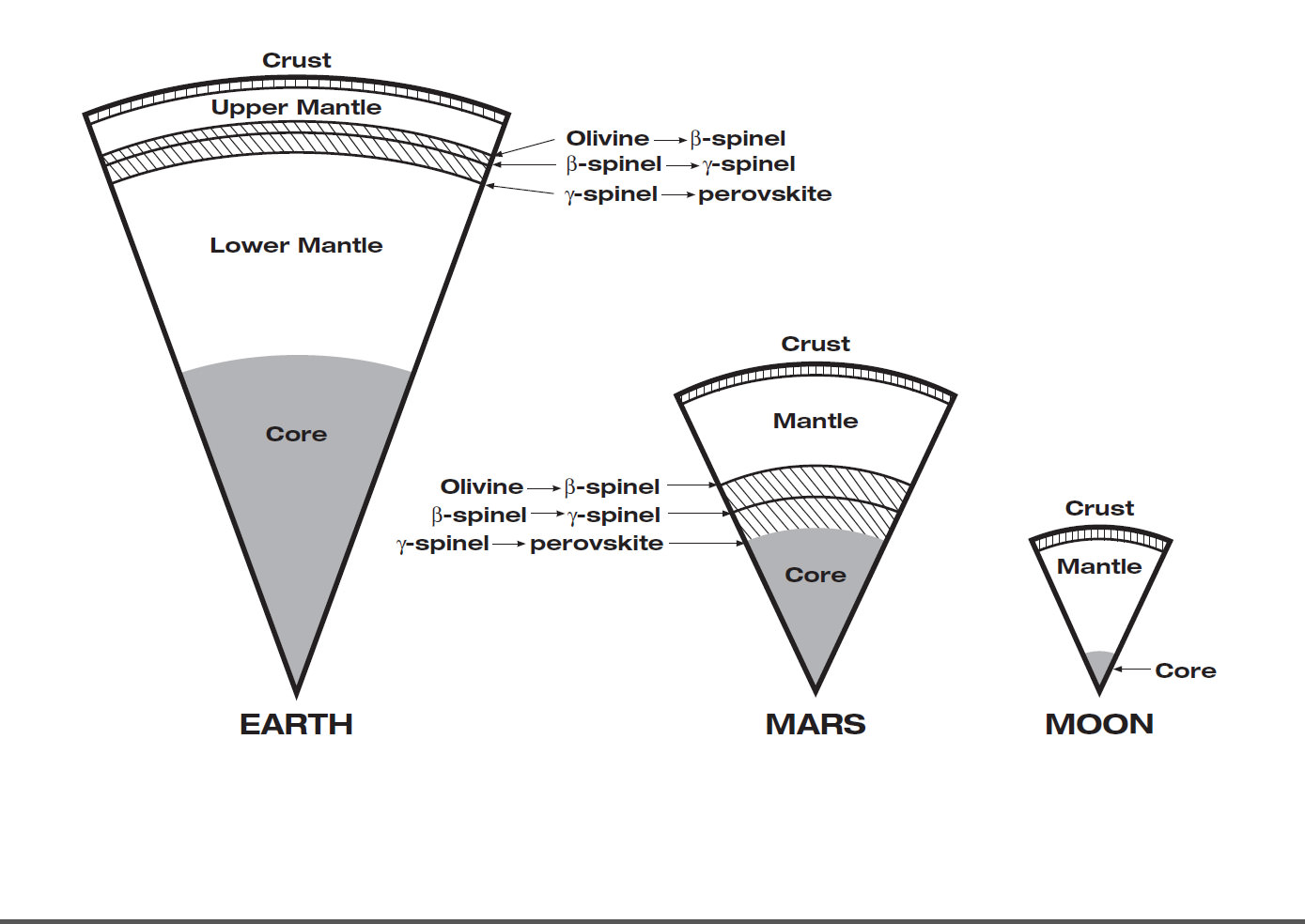
Mars has the same basic internal structure as the Earth and other terrestrial (rocky) planets. It is large enough to have pressures equivalent to those throughout the Earth's upper mantle, and it has a core with a similar fraction of its mass. In contrast, the pressure even near the center of the Moon barely reach that just below the Earth's crust and it has a tiny, almost negligible core. The size of Mars indicates that it must have undergone many of the same separation and crystallization processes that formed the Earth's crust and core during early planetary formation. Credit: JPL/NASA
InSight is one of three missions vying to be selected for flight in NASA’s Discovery Program, a series of low cost NASA missions to understand the solar system by exploring planets, moons, and small bodies such as comets and asteroids. All three mission teams are required to submit concept study reports to NASA on March 19.
Banerdt’s team is working hard to finalize the concept study report.
“It describes the mission design as we have refined it over the past 9 months since the NASA Step-1 selection.”
So there is no guarantee that InSight will fly. Because of severe budget cuts to NASA’s Planetary Science Division, NASA had to cancel its scheduled participation in two other Mars missions dubbed ExoMars and jointed planned with ESA, the European Space Agency, for launch in 2016 and 2018.
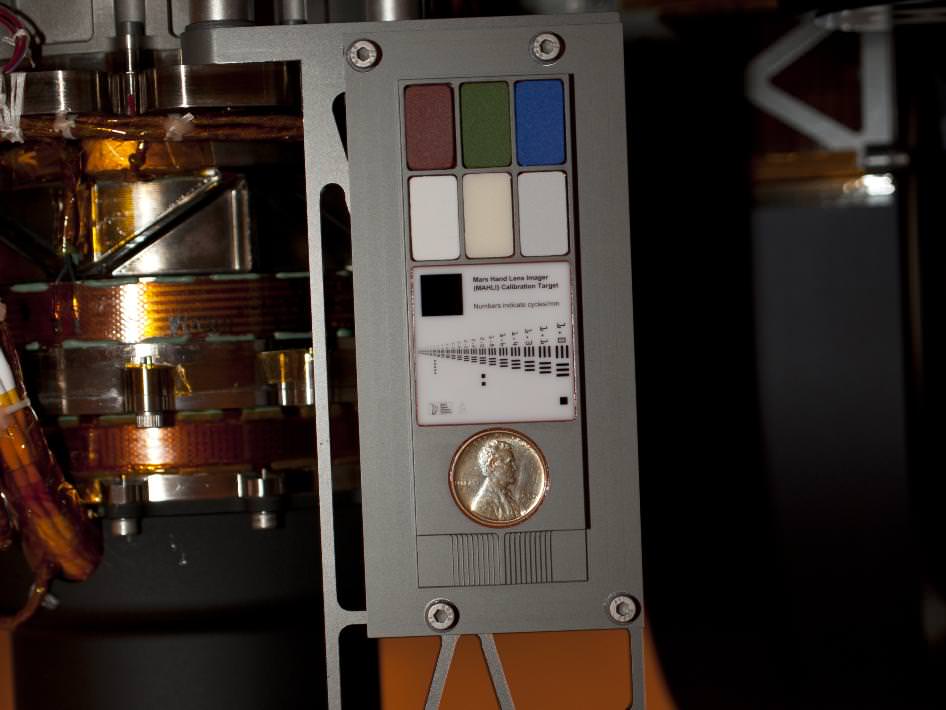
NASA's Mars rover Curiosity carries a Lincoln Penny on the calibration target to be used by a camera at the end of the robotic arm. The calibration target for the Mars Hand Lens Imager (MAHLI) camera is attached to a shoulder joint of the arm. Inset shows the location of the calibration target. Credit: NASA/JPL-Caltech
[/caption]
NASA’s huge Curiosity Mars Science Lab (MSL) rover is carrying a vintage Lincoln penny along for the long interplanetary journey to Mars – and it’s not to open the first Martian savings account.
Scientists will use the century old Lincoln penny – minted back in 1909 – as a modern age calibration target for one of Curiosity’s five powerful science cameras attached to the end of the hefty, 7 foot (2.1 meter) long robotic arm.
The car sized rover is on course to touchdown at the foothills of a towering and layered mountain inside Gale Crater in just 161 days on Aug. 6, 2012.
So far Curiosity has traveled 244 million kilometers since blasting off on Nov. 26, 2011 from Florida and has another 322 million kilometers to go to the Red Planet.
The copper penny is bundled to a shoulder joint on the rovers arm along with the other elements of the calibration target, including color chips, a metric standardized bar graphic, and a stair-step pattern for depth calibration.
The whole target is about the size of a smart phone and looks a lot like an eye vision chart in an ophthalmologist’s office. And it serves a similar purpose, which will be to check the performance of Curiosity eyes – specifically the Mars Hand Lens Imager (MAHLI) camera located at the terminus of the robotic arm.
Curiosity’s Calibration Target
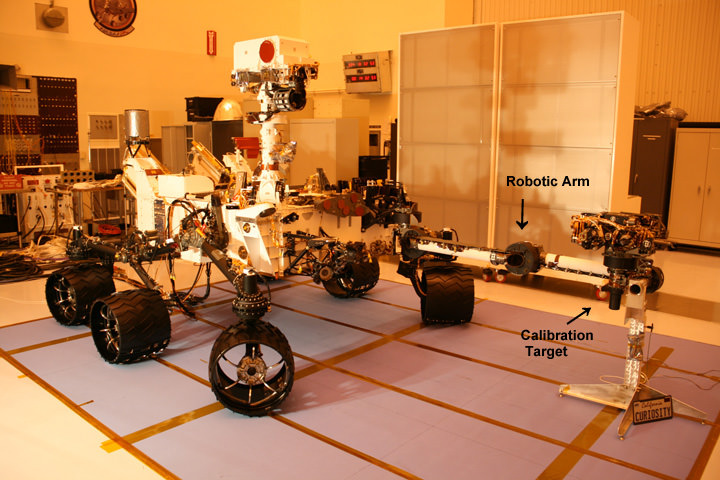
Two instruments at the end of the robotic arm on NASA's Mars rover Curiosity will use calibration targets attached to a shoulder joint of the arm. Credit: NASA/JPL-Caltech
MAHLI will conduct close-up inspections of Martian rocks and soil. It can show tiny details, finer than a human hair.
The term “hand lens” in MAHLI’s name refers to the standard practice by field geologists’ of carrying a hand lens during expeditions for close up, magnified inspection of rocks they find along the way. So it’s also critical to pack various means of calibration so that researchers can interpret their results and put them into proper perspective.
MAHLI can also focus on targets over a wide range of distances near and far, from about a finger’s-width away out to the Red Planets horizon, which in this case means the mountains and rim of the breathtaking Gale Crater landing site.
“When a geologist takes pictures of rock outcrops she is studying, she wants an object of known scale in the photographs,” said MAHLI Principal Investigator Ken Edgett, of Malin Space Science Systems, San Diego, which supplied the camera to NASA.
Curiosity Mars Science Laboratory Rover - inside the Cleanroom at KSC
Curiosity with robotic arm extended. Calibration target is located at a shoulder joint on the arm. Photo taken just before encapsulation for 8 month long interplanetary Martian Journey and touchdown inside Gale Crater. Credit: Ken Kremer
The target features a collection of marked black bars in a wide range of labeled sizes to correlate calibration images to each image taken by Curiosity.
“If it is a whole cliff face, she’ll ask a person to stand in the shot. If it is a view from a meter or so away, she might use a rock hammer. If it is a close-up, as the MAHLI can take, she might pull something small out of her pocket. Like a penny.”
Edgett donated the special Lincoln penny with funds from his own pocket. The 1909 “VDB” cent stems from the very first year that Lincoln pennies were minted and also marks the centennial of President Abraham Lincoln’s birth. The VDB initials of the coin’s designer – Victor David Brenner — are on the reverse side. In mint condition the 1909 Lincoln VDB copper penny has a value of about $20.
The Lincoln penny in this photograph is part of a camera calibration target attached to NASA's Mars rover Curiosity. Credit: NASA/JPL-Caltech
“The penny is on the MAHLI calibration target as a tip of the hat to geologists’ informal practice of placing a coin or other object of known scale in their photographs. A more formal practice is to use an object with scale marked in millimeters, centimeters or meters,” Edgett said. “Of course, this penny can’t be moved around and placed in MAHLI images; it stays affixed to the rover.”
“Everyone in the United States can recognize the penny and immediately know how big it is, and can compare that with the rover hardware and Mars materials in the same image,” Edgett said.
“The public can watch for changes in the penny over the long term on Mars. Will it change color? Will it corrode? Will it get pitted by windblown sand?”
MAHLI’s calibration target also features a display of six patches of pigmented silicone to assist in interpreting color and brightness in the images. Five of them are leftovers from Spirit and Opportunity. The sixth has a fluorescent pigment that glows red when exposed to ultraviolet light, allows checking of an ultraviolet light source on MAHLI. The fluorescent material was donated to the MAHLI team by Spectra Systems, Inc., Providence, R.I.
Three-dimensional calibration of the MSL images will be done using the penny and a stair-stepped area at the bottom of the target.
“The importance of calibration is to allow data acquired on Mars to be compared reliably to data acquired on Earth,” said Mars Science Laboratory Project Scientist John Grotzinger, of the California Institute of Technology, Pasadena.
Curiosity is a 1 ton (900 kg) behemoth. She measures 3 meters (10 ft) in length and is nearly twice the size and five times as heavy as Spirit and Opportunity, NASA’s prior set of twin Martian robots. The science payload is 15 times heavier than the twin robots.
Curiosity is packed to the gills with 10 state of the art science instruments that are seeking the signs of life in the form of organic molecules – the carbon based building blocks of life as we know it.
NASA could only afford to build one rover this time.
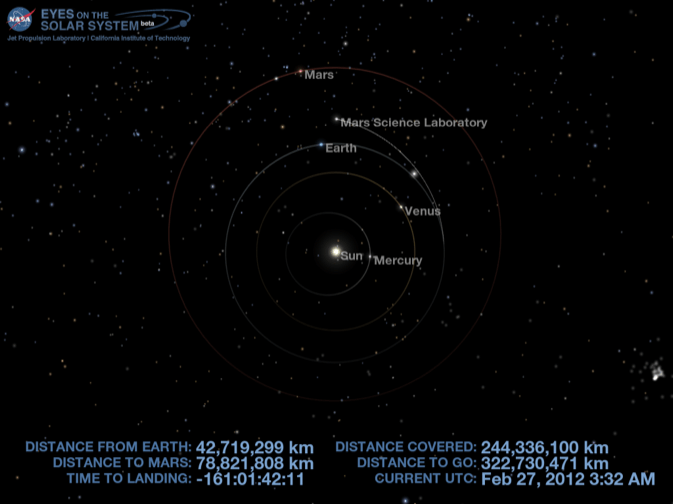
Curiosity MSL location on 27 Feb 2012. Credit: NASA
Curiosity will be NASA’s last Mars rover since the 4th generation ExoMars rover due to liftoff in 2018 was just cancelled by the Obama Administration as part of a deep slash to NASA’s Planetary Science budget.
Feb. 24, 2012 launch of Atlas V with MUOS-1. Credit: Jen Scheer (@flyingjenny)
[/caption]
On the afternoon of February 24, 2012, at 5:15 p.m. EST local time, a United Launch Alliance Atlas V rocket lifted off from the pad at Cape Canaveral Air Force Base carrying in its payload the US Navy’s next-generation narrowband communications satellite MUOS-1. After two scrubbed launches the previous week due to weather, the third time was definitely a charm for ULA, and the launch went nominally (that’s science talk for “awesome”.)
But what made that day, that time the right time to launch? Do they just like ending a work week with a rocket launch? (Not that I could blame them!) And what about the weather… why go through the trouble to prepare for a launch at all if the weather doesn’t look promising? Where’s the logic in that?
As it turns out, when it comes to launches, it really is rocket science.
There are a lot of factors involved with launches. Obviously all the incredible engineering it takes to even plan and build a launch vehicle, and of course its payload — whatever it happens to be launching in the first place. But it sure doesn’t end there.
Launch managers need to take into consideration the needs of the mission, where the payload has to ultimately end up in orbit… or possibly even beyond. Timing is critical when you’re aiming at moving targets — in this case the targets being specific points in space (literally.) Then there’s the type of rocket being used, and where it is launching from. Only then can weather come into the equation, and usually only at the last minute to determine if the countdown will proceed before the launch window closes.
How big that launch window may be — from a few hours to a few minutes — depends on many things.
Kennedy Space Center’s Anna Helney recently assembled an article “Aiming for an Open Window” that explains how this process works:
_________________
The most significant deciding factors in when to launch are where the spacecraft is headed, and what its solar needs are. Earth-observing spacecraft, for example, may be sent into low-Earth orbit. Some payloads must arrive at a specific point at a precise time, perhaps to rendezvous with another object or join a constellation of satellites already in place. Missions to the moon or a planet involve aiming for a moving object a long distance away.
For example, NASA’s Mars Science Laboratory spacecraft began its eight-month journey to the Red Planet on Nov. 26, 2011 with a launch aboard a United Launch Alliance (ULA) Atlas V rocket from Cape Canaveral Air Force Station in Florida. After the initial push from the powerful Atlas V booster, the Centaur upper stage then sent the spacecraft away from Earth on a specific track to place the laboratory, with its car-sized Curiosity rover, inside Mars’ Gale Crater on Aug. 6, 2012. Due to the location of Mars relative to Earth, the prime planetary launch opportunity for the Red Planet occurs only once every 26 months.
Additionally, spacecraft often have solar requirements: they may need sunlight to perform the science necessary to meet the mission’s objectives, or they may need to avoid the sun’s light in order to look deeper into the dark, distant reaches of space.
A Delta II arcs across the sky carrying NASA's Suomi NPP spacecraft. Image credit: NASA/Bill Ingalls
Such precision was needed for NASA’s Suomi National Polar-orbiting Partnership (NPP) spacecraft, which launched Oct. 28, 2011 aboard a ULA Delta II rocket from Vandenberg Air Force Base in California. The Earth-observing satellite circles at an altitude of 512 miles, sweeping from pole to pole 14 times each day as the planet turns on its axis. A very limited launch window was required so that the spacecraft would cross the ascending node at exactly 1:30 p.m. local time and scan Earth’s surface twice each day, always at the same local time.
All of these variables influence a flight’s trajectory and launch time. A low-Earth mission with specific timing needs must lift off at the right time to slip into the same orbit as its target; a planetary mission typically has to launch when the trajectory will take it away from Earth and out on the correct course.
According to [Eric Haddox, the lead flight design engineer in NASA’s Launch Services Program], aiming for a specific target — another planet, a rendezvous point, or even a specific location in Earth orbit where the solar conditions will be just right — is a bit like skeet shooting.
“You’ve got this object that’s going to go flying out into the air and you’ve got to shoot it,” said Haddox. “You have to be able to judge how far away your target is and how fast it’s moving, and make sure you reach the same point at the same time.”
But Haddox also emphasized that Earth is rotating on its axis while it orbits the sun, making the launch pad a moving platform. With so many moving players, launch windows and trajectories must be carefully choreographed.
__________________
It’s a fascinating and complex set of issues that mission managers need to get just right in order to ensure the success of a launch — and thus the success of a mission, whether it be putting a communication satellite into orbit or a rover onto Mars… or somewhere much, much farther than that.