
To casual observers, landing a rover on Mars can seem kind of like old news, believe it or not. Especially after all of NASA’s successes. But many are likely not aware of the so-called ‘Mars Curse.‘ The fact is, many of the spacecraft that attempt to land there fail and crash.
Next to run the gauntlet of the Mars Curse is NASA’s Perseverance rover. It’ll attempt its long-awaited landing at Jezero Crater on February 18th. The people at NASA have given the Perseverance rover some finely-tuned tools to get it to the Martian surface safely and to beat the Mars curse.
“So, if you land on one of those hazards, it could be catastrophic to the whole mission.”
Andrew Johnson, principal robotics systems engineer at NASA’s JPL
The Perseverance rover is landing at Jezero Crater because NASA thinks they can do the best science there. The mission’s goal is to seek signs of ancient life and collect samples for a potential return to Earth. Jezero Crater is an ancient, dried-up paleo-lakebed. It holds both preserved sediments and a delta. According to NASA, the crater is one of the “oldest and most scientifically interesting landscapes Mars has to offer.” Scientists think that if there’s any fossilized evidence of ancient life, they may find it at Jezero.

But it’s also hazardous to land in.
“Jezero is 28 miles wide, but within that expanse, there are a lot of potential hazards the rover could encounter: hills, rock fields, dunes, the walls of the crater itself, to name just a few,” said Andrew Johnson, principal robotics systems engineer at NASA’s Jet Propulsion Laboratory in Southern California. “So, if you land on one of those hazards, it could be catastrophic to the whole mission.”
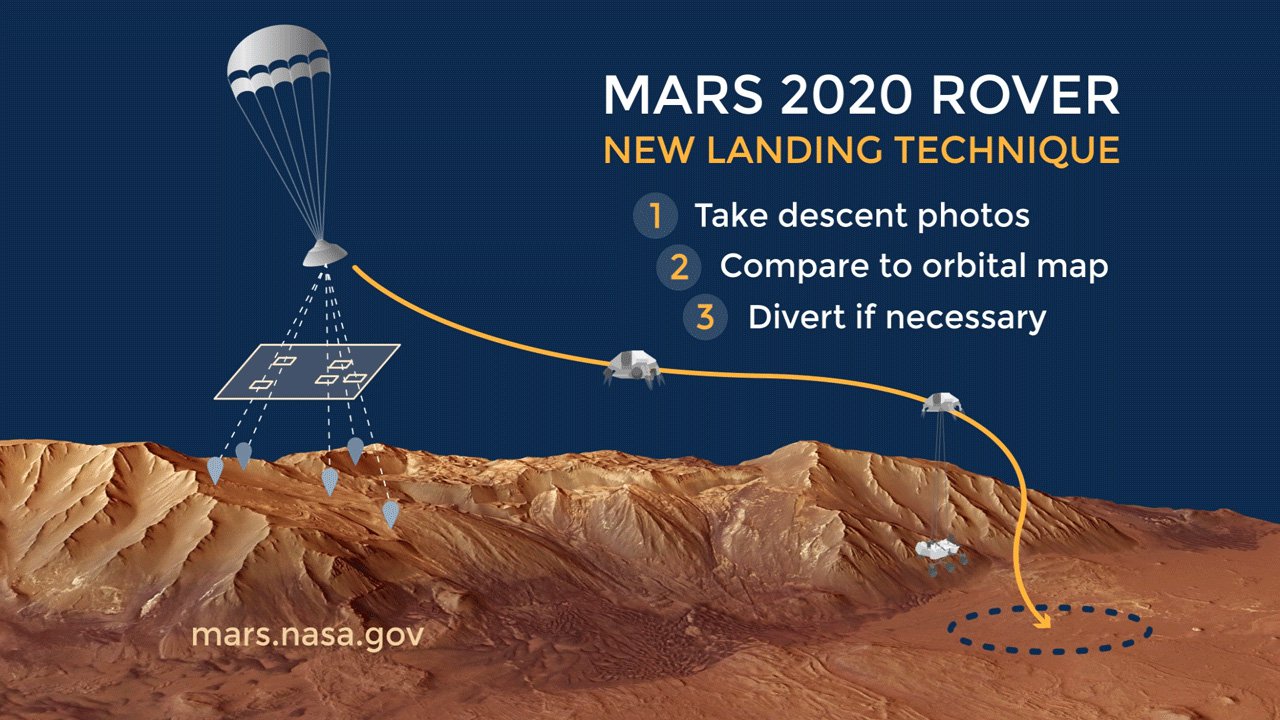
About 60% of all spacecraft sent to Mars fail. Perseverance will use what’s known as ‘Terrain Relative Navigation” (TRN), a technology first used in cruise missiles, to avoid that same failure. In broad terms, TRN consists of two elements: an onboard map of the landing area with elevations and hazards, and a navigation camera. As Perseverance approaches its landing ellipse, the camera compares its real-time images with the onboard map and commands the lander’s rockets to direct the craft away from known hazards.
Overall, the rover’s autonomous landing system is known as ‘landing visions system,’ or LVS.
“For Mars 2020, LVS will use the position information to figure out where the rover is relative to safe spots between those hazards. And in one of those safe spots is where the rover will touch down,” Johnson explained in a press release.
This type of system has been under development for some time now. NASA’s OSIRIS-REx used one in its risky sample-collection maneuver at asteroid Bennu. That system was called Natural Feature Tracking (NFT) and it effectively guided the spacecraft down to Bennu’s boulder-littered surface. OSIRIS-REx’s mission was successful, and the samples should arrive on Earth in September 2023.
But a system like Perseverance’s doesn’t come without a lot of hard work and lead time. It’s been in development for several years, and hopefully, all that development and testing will pay off.

Swati Mohan is the guidance, navigation, and control operations lead for Mars 2020 at JPL. The first two stages of testing were hardware and simulation, and they were both done in a lab. In the press release, Mohan said, “That’s where we test every condition and variable we can. Vacuum, vibration, temperature, electrical compatibility – we put the hardware through its paces.”
Once the hardware has been subjected to all that scrutiny, it’s time for simulations. “Then with simulation, we model various scenarios that the software algorithms may encounter on Mars – a too-sunny day, very dark day, windy day – and we make sure the system behaves as expected regardless of those conditions,” Mohan said.
After that, the system was ready for flight tests. But not autonomously. Instead, it was tested on a helicopter, where it was used to estimate the helicopter’s altitude and position.

“That got us to a certain level of technical readiness because the system could monitor a wide range of terrain, but it didn’t have the same kind of descent that Perseverance will have,” said Johnson. “There was also a need to demonstrate LVS on a rocket.”
The LVS system was tested repeatedly in the field on a rocket. That rocket, the Masten Space System Xombie, served as a test-bed for LVS starting in 2014. NASA’s Flight Opportunities Program funded those tests.
“Testing on the rocket laid pretty much all remaining doubts to rest and answered a critical question for the LVS operation affirmatively,” said JPL’s Nikolas Trawny, a payload and pointing control systems engineer who worked closely with Masten on the 2014 field tests. “It was then that we knew LVS would work during the high-speed vertical descent typical of Mars landings.”
“The testing that Flight Opportunities is set up to provide was really unprecedented within NASA at the time,” said Johnson. “But it’s proven so valuable that it’s now becoming expected to do these types of flight tests. For LVS, those rocket flights were the capstone of our technology development effort.”
“And once we get that signal from the rover that says, ‘I’ve landed and I’m on stable ground,’ then we can celebrate.”
Swati Mohan, Guidance, Navigation, and Control Operations Lead for Mars 2020 at JPL.
The LVS system is complex. Not only can it guide the Perseverance rover to the surface, but it can do so in the most fuel-efficient fashion. Fuel for the lander’s rockets is limited, obviously, so there’s really only one chance to get it right. Altogether, the system was tested successfully and is now only days away from the real deal: the landing at Jezero Crater.
But even with all of the thorough testing of the autonomous system, there can still be surprises. Real life is always different than simulations, and though NASA is confident in the system, they’ll still be ready to respond and adapt to any problems or changing conditions.
“Real life can always throw you curve balls. So, we’ll be monitoring everything during the cruise phase, checking power to the camera, making sure the data is flowing as expected,” Mohan said. “And once we get that signal from the rover that says, ‘I’ve landed and I’m on stable ground,’ then we can celebrate.”