This summer, NASA’s Perseverance rover will launch from Cape Canaveral Air Force Base in Florida. When it arrives on Mars (on February 18th, 2021), it will join the Curiosity rover and a host of other missions that are looking for evidence of past and present life on the Red Planet. At present, engineers at the Kennedy Space Center in Florida are conducting the final assembly of the rover in preparation for launch.
With less than 14 weeks to go before the mission’s launch period opens up, several important development milestones have been completed. This includes integrating the rover’s remaining components, like the rover’s six wheels and the small helicopter drone that will help explore the surface. These elements, and a slew of other final preparations, were integrated with the rover over the past few weeks.
According to a new study, EDLS hardware that has been jettisoned on Mars could create problems for future missions to the same landing sites. Credit: NASA
One of the most common features of space exploration has been the use of disposable components to get missions to where they are going. Whether we are talking about multistage rockets (which fall away as soon as they are spent) or the hardware used to achieve Entry, Descent and Landing (EDL) onto a planet, the idea has been the same. Once the delivery mechanism is used up, it is cast away.
However, in so doing, we could be creating a hazardous situation for future missions. Such is the conclusion reached by a new study from the Finnish Meteorological Institute in Helsinki, Finland. With regard to the use of Entry, Descent and Landing (EDL) systems, the study’s author – Dr. Mark Paton – concludes that jettisoned hardware from missions to Mars could create a terrible mess near future landing sites.
Dr. Mark Paton is a planetary research scientist who specializes in the interaction between the Martian atmosphere and its surface. As such, he is well-versed in the subject of EDL systems that are designed to land missions on Solar System bodies that have atmospheres. This is certainly a going concern for Mars, where landers and rovers have relied on various means to get to the surface safely.
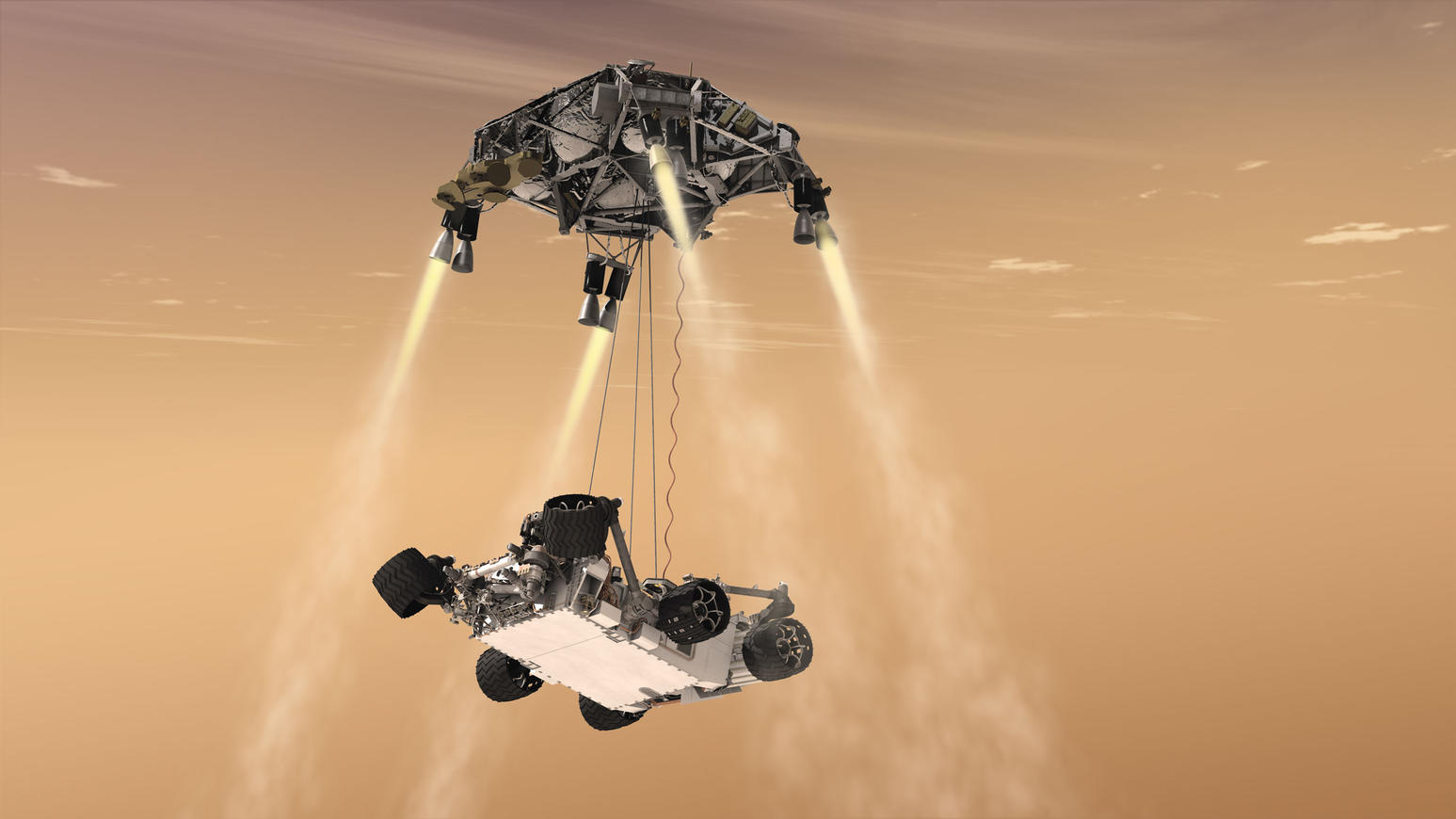
Consider the Curiosity rover, which used a separate EDL system – known as the Sky Crane – to land on Mars in 2012. As the first EDL system of its kind, the Sky Crane was a essentially a rocket-powered backpack mounted on top of the rover. This system kicked in after Curiosity separated from its Descent module (which was slowed by a parachute) and used rockets to slow the rover’s decent even further.
Once it was sufficiently close to the surface, the Sky Crane lowed the rover to the ground with tethers measuring 6.4 meters (21 ft) long. It then detached and landed a safe distance away, not far from the Descent module’s heat shield, backshell, and parachute landed. These jettisoned bits were all photographed from orbit by the MSL’s HiRISE instrument a day after the landing.
Unfortunately, this kind of technology does not address another major concern – which is the accumulation of spent hardware components on the surface of a planet. In time, these could pose risks for future missions, mainly because they have the potential of being blown around and cluttering up other (and future) landing sites that are located not far away.
Artist’s impression of the Mars 2020 with its sky crane landing system deployed. Credit: NASA/JPL
As Dr. Paton indicated in an interview with Seeker columnist (and Universe Today alumnist) Elizabeth Howell:
“Currently available landing systems, using heat shield and parachutes, might be problematic because jettisoned hardware from these landers normally land within a few hundred meters of the lander. I would imagine a sample return mission would not jettison its parachute in close vicinity of the target sample or the cached sample. The parachute might cover the sample, making its retrieval a problem. Landers using large parachutes or other large devices probably pose the greatest risk as these could be easily blown onto equipment on the surface, damaging or covering it.”
For the sake of his study, Dr. Paton relied on 3D computer modelling (using the space flight simulator Orbiter) to examine different types of ELD systems. He then conducted meteorological measurements to determine wind speeds and direction within the Martian Planetary Boundary Layer (PBL), in order to determine their influence on the distribution of jettisoned components across the surface of Mars.
What he found was that winds speeds within the Martian PBL were sufficient enough to blow around certain types of EDL systems. This included parachutes – a mainstay of space missions – as well as next-generations concepts like the HIAC. Basically, these components could be blown onto prelanded assets, even when the lander itself has touched down several kilometers away.
This could play havoc with robotic missions that have sensitive equipment or are attempting to collect samples for return to Earth. And as for crewed missions – such as NASA’s proposed “Journey to Mars”, which is expected to take place in the 2030s – the results could be even worse. Crew habitats, which will be part of all future crewed missions, will rely on solar panels and other devices that need to be free of clutter in order to function.
Artist’s concept of the Deceleration module of Mars Science Laboratory in entering the Martian Atmosphere. Credit: NASA/JPL-Caltech
As such, Dr. Paton advises that future missions be designed so that the amount of hardware they leave behind is minimized. In addition, he advises that any future missions will need to take into account meteorological measurement to make sure that jettisoned components are not likely to blow back and interfere with missions in progress.
“For new landing systems, a detailed trade-off analysis would be required to determine the best way to mitigate this problem,” he said. “To be sure that the wind is blowing away from any landed assets, the winds in the lower few kilometers of the atmosphere would ideally need to be measured close to the time of the lander’s expected arrival.”
As if planning missions to Mars wasn’t already challenging enough! In addition to all the things we need to worry about in getting there, now we need to worry about keeping our landing sites in pristine order. But of course, such considerations are understandable since our presence on Mars is expanding, and many key missions are planned for the coming years.
These include more robotic rovers in the next decade – i.e NASA’s Mars 2020 rover, the ESA’s Exomars rover, and the ISRO’s Mangalyaan 2 rover – an even NASA’s proposed “Journey to Mars” by the 2030s. If we’re going to make Mars a regular destination, we need to learn to pick up after ourselves!
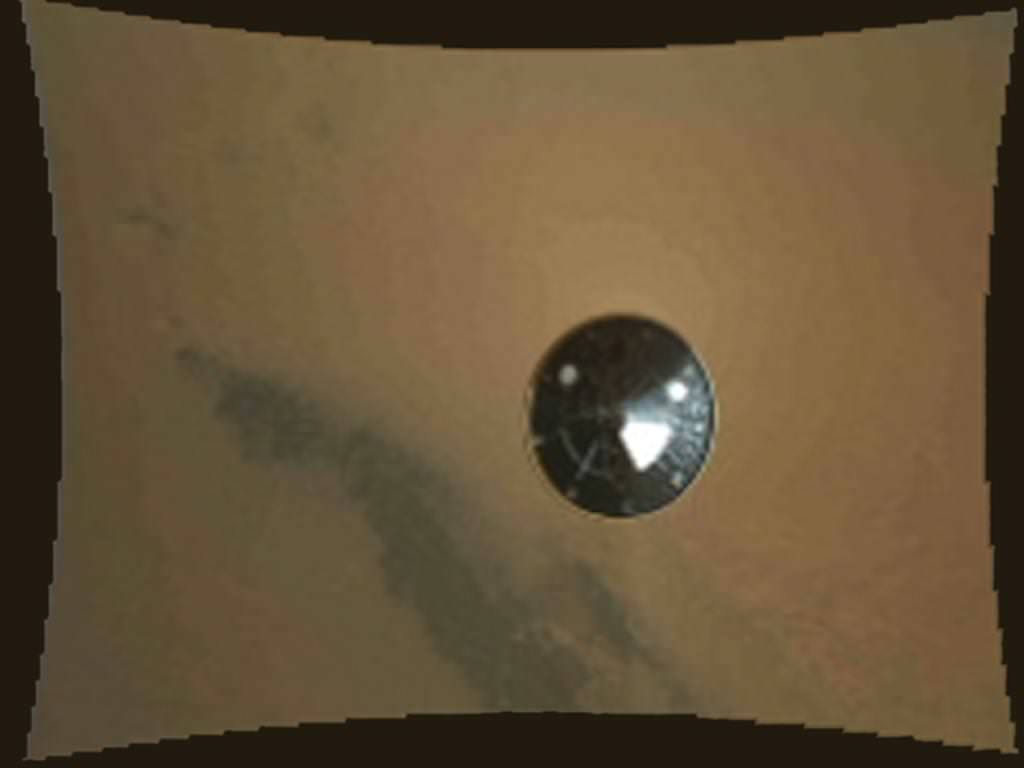
When Curiosity executed a perfect six-wheel landing on Mars on the morning of August 6 to the excitement of millions worldwide — not to mention quite a few engineers and scientists at JPL — it immediately began relaying images back to Earth. Although the initial views were low-resolution and taken through dusty lens covers, features of the local landscape around the rover could be discerned… distant hills, a pebbly surface, the rise of Gale Crater’s central peak — and a curious dark blur on the horizon that wasn’t visible in later images.
What could it have been? Another bit of lens dust? An image artifact? A piece of ancient Martian architecture that NASA demanded be erased from the image? As it turns out, it was most likely something even cooler (or at least real): the result of Curiosity’s descent stage crash-landing into the Martian surface.
Seen in an image from NASA’s Mars Reconnaissance Orbiter’s HiRISE camera, the remnants of Curiosity’s descent to Mars are scattered around the landing site. The heat shield, parachute, back shell — and undeniably the star player of Curiosity’s EDL sequence, the descent stage and sky crane — all landed in relatively close proximity to where the rover touched down. As it turned out, Curiosity’s’s rear Hazcam happened to be aimed right where the sky crane landed after it severed Curiosity’s bridles and rocketed safely away — just as it had been shown in the landing animation.
Seen in the first images captured by Curiosity’s rear Hazcams just minutes after touchdown — but not in higher-resolution images acquired later — the dark blur is now thought to be a plume of dust and soil kicked up by the sky crane’s impact.
“We know that the cloud was real because we saw it in both the left and right rear Hazcams, so it wasn’t just a smudge on the lens cover or anything like that… and then 45 minutes later it was gone,” said Steven Sell, Deputy Operations for Entry, Descent and Landing at JPL, during an interview with Universe Today on Friday.
“When we were putting together the sequence of images of what would happen after touchdown, we specifically put in the Hazcam shots as soon as we could on the off chance that we would see something,” Sell said. “It was just one of those things where we had some choices we could make, and we said if we put these really close to landing maybe we’ll actually see part of the descent stage.”
Although capturing the sky crane or other part of the descent stage on camera was an intriguing idea, it wasn’t any particular goal of the mission.
“We know that the cloud was real because we saw it in both the left and right rear Hazcams, so it wasn’t just a smudge on the lens cover or anything like that.”
– Steven Sell, Deputy Operations for Entry, Descent and Landing at JPL in Pasadena, CA
“We literally weren’t even thinking about it,” Sell said. “It’s a total bonus that we were able to capture that.”
Unfortunately, the plume only appears in the initial Hazcam shots, which were taken through lens covers coated with dust from landing. It wasn’t until nearly an hour later that the covers were removed and clearer images were captured, and by then the plume was gone. Plus the Hazcams themselves are low-resolution by design — they’re more for navigation than landscape photography.
“Those cameras are not intended for doing that kind of science, or even any science at all,” said Sell. “They’re strictly engineering cameras.”
It’s been said that the best camera is the one you have with you, and in this case Curiosity’s best camera happened to be aimed in the right place at the right time. Plus the sky crane just so happened to land in view of the cameras that got turned on first, which wasn’t a guarantee.
“The descent stage had two possible directions to go: it could have gone forward or backward,” Sell explained. “The way it decides which way to go is whichever direction would take it more north. We knew that the science target is toward the south — the scientists want to study the mountain — and so we didn’t want to throw the descent stage toward the mountain.
“The good news is that the forward Hazcams were at a lower temperature upon landing, we knew they were going to be colder,” Sell said. “The cameras have to reach a certain temperature before they can take a picture, so we knew the rear Hazcams were going to get the picture first, and so the fact that the thing flew to the rear was another coincidence.”
About the same mass as the rover itself, the sky crane weighed about 800 kg (1700 lbs) at the time of impact — including 100 kg of fuel — and hit going 100 mph. That’s going to kick up a good-sized plume (although exactly how large has yet to be determined.)
“It was one hell of an impact,” Sell said.
You can watch Steve Sell describe this and other data from the first few days of the MSL mission in the press conference held at JPL on Friday, August 10 below, and follow Sell on his Twitter feed here.
Images: NASA/JPL-Caltech. HiRISE image NASA/JPL/University of Arizona.
Image Caption: Curiosity Heat shield falls away from the bottom of Curiosity and the Sky Crane descent stage in this image from the MARDI camera.
Watch the video below. Credit: NASA/JPL/MSSS
As NASA’s Curiosity Mars Science Lab (MSL) was in the final stages of her flawless but harrowing decent to Gale Crater on Mars overnight (Aug. 5/6) employing the never-before-used rocket powered sky crane descent stage, dramatic movie-like imagery of the plunge was being recorded by MARDI, the Mars Descent Imager camera positioned on the belly of the rover and pointed downwards.
The first low resolution MARDI images and video (above and below) were beamed back to Earth just hours after landing and clearly show the jettisoning of the heat shield moments after it sprung loose to expose Curiosity and MARDI for landing.
“We see the heat shield falling away about 2 minutes and 30 seconds from touchdown,” said Mike Malin, MARDI Principal Investigator from Malin Space Systems at a post-landing news briefing today (Aug. 6). “The heat shield is about 16 meters (50 ft) away in the image and 4.5 m (15 ft) across.”
“I’m very excited to be at Gale Crater”.
“So far we have received about 297 thumbnail images (192 x 144 pixels) so far and created a stop motion video. MADRI was collecting images at 4 frames per second. In the final frames you can see dust being kicked up the rocket engines.”
Curiosity landed at 1:32 on Aug. 6, EDT (11:32 p.m. Aug. 5, PDT), near the foot of a mountain three miles(5 km) tall inside Gale Crater, 96 miles (154 km) in diameter.
Video Caption: The Curiosity Mars Descent Imager (MARDI) captured the rover’s descent to the surface of the Red Planet. The instrument shot 4 fps video from heatshield separation to the ground. Credit: NASA/JPL/MSSS
“The image sequence received so far indicates Curiosity had, as expected, a very exciting ride to the surface,” said Mike Malin, imaging scientist for the Mars Science Lab mission from Malin Space Systems in San Diego. “But as dramatic as they are, there is real other-world importance to obtaining them. These images will help the mission scientists interpret the rover’s surroundings, the rover drivers in planning for future drives across the surface, as well as assist engineers in their design of forthcoming landing systems for Mars or other worlds.”
“A good comparison is to that grainy onboard film from Apollo 11 when they were about to land on the moon,” said Malin.
Over 1500 hundred more low and high resolution MARDI images (1600 x 1200 pixels) will be sent back over the next few weeks to make a full frame animation and will provide the most complete and dramatic imagery of a planetary landing in the history of exploration.
The team has been able to determine Curiosity’s location to “within” about 1 meter says Malin, by matching the MARDI and MRO HiRISE images as well as the Hazcam images.
“So far the rover is healthy and we are ecstatic with its performance,” said Jennifer Trospher, MSL mission manager
The next steps are to deploy the high gain antenna (HGA), raise the mast with the higher resolution cameras and continue to check out the mechanical and electrical systems as well the science instruments as the rover is transitioned to surface operations mode.
One of the biggest unknowns for the Mars Science Lab — a.k.a Curiosity — is the landing system, called the Sky Crane, which has never been used before for a spacecraft landing on another planet. It is similar to a sky crane heavy-lift helicopter, and it works like this: after a parachute slows the rover’s descent toward Mars, a rocket-powered backpack will lower the rover on a tether during the final moments before landing. This method allows landing a very large, heavy rover on Mars (instead of the airbag landing systems of previous Mars rovers).