Stitched together from 28 images, this view from NASA's Curiosity Mars rover was captured after the rover ascended the steep slope of a geologic feature called "Greenheugh Pediment." In the distance at the top of the image is the floor of Gale Crater, which is near a region called Aeolis Dorsa that researchers believe was once a massive ocean. The layered structure of the rocks indicated they were created by waterborne sediment. Credit: NASA/JPL-Caltech/MSSS.
Scientists have long suspected that Mars was once warm and wet in its ancient past. The Mars Ocean Hypothesis says that the planet was home to a large ocean around 4 billion years ago. The ocean filled the Vastitas Borealis basin in the planet’s northern hemisphere. The basin is 4–5 km (2.5–3 miles) below Mars’ mean elevation.
A new topographic map of Mars reinforces the hypothesis and adds more detail.
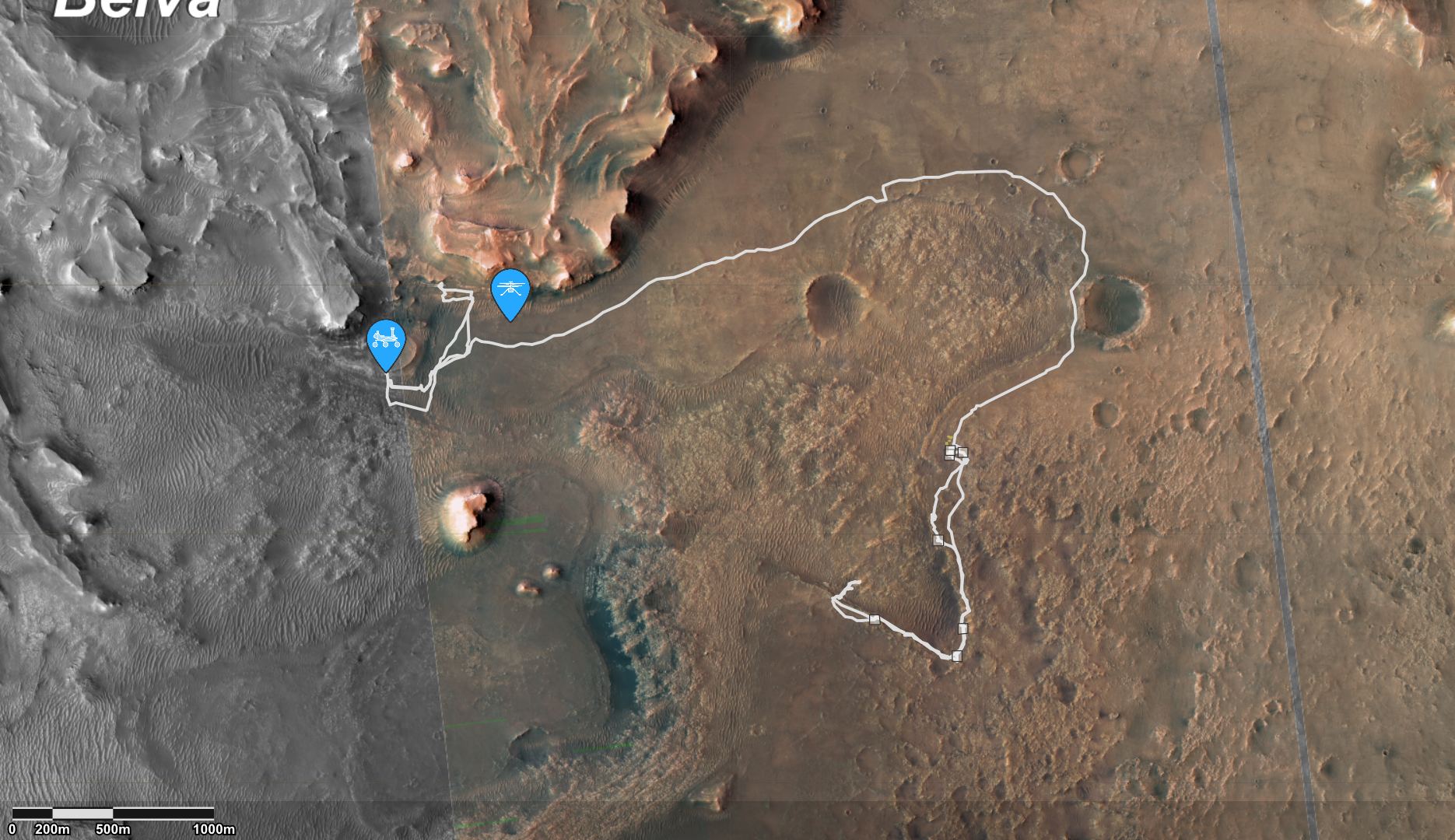
The path followed by Perseverance in the Jezero Crater since landing in February 2021. Credit: NASA
On May 1st, 2009, after five years on the Martian surface, the Spirit rover got stuck in a patch of soft sand (where it would remain for the rest of its mission). On February 13th, 2019, NASA officials declared that Spirit’s sister – the Opportunity rover – had concluded its mission after a planetary dust storm forced it into hibernation mode about seven months prior. And in March 2017, the Curiosity rover’s wheels showed signs of their first break, thanks to years of traveling over rough terrain. Such are the risks of sending rover missions to other planets in search of discoveries that can lead to scientific breakthroughs.
But what constitutes an acceptable risk for a robotic mission, and when are mission controllers justified in taking them? As it turns out, a pair of researchers from the Robotics Institute‘s School of Computer Science at Carnegie Mellon University (CMU) in Pittsburgh have developed a new approach for weighing the risks against the scientific value of sending planetary rovers into dangerous situations. The researchers are now working with NASA to implement their approach for future robotic missions to the Moon, Mars, and other potentially-hazardous environments in the Solar System.
Illustration of NASA astronauts on the lunar South Pole. Mission ideas we see today have at least some heritage from the early days of the Space Age. Credit: NASA
The Moon may seem barren, and it is. However, a certain species of inquisitive primates is still very interested in exploring the Moon, uncovering its secrets and maybe establishing a longer-term presence there. But thirsty primates need water, and there’s only one primary source on the Moon: the frozen water in shadowed craters at the lunar poles.
Created by an eruption five years ago, the Holuhraun lava flow field in Iceland is some of the newest "real estate" in the world where Christopher Hamilton and his team are testing new ways for drones and rovers to work together to explore Mars. Image Credit: Christopher Hamilton, LPL.
It’s looking more and more like the future of space exploration could involve drones in a big way.
We’ve already seen it here on Earth, where all kinds of flying drones are used by all kinds of people for all kinds of things. Drones are particularly useful in resource development, exploration, imaging, and remote sensing.
Could the future see drones flying around in the thin Martian atmosphere?
The ESA's Rover Autonomy Testbed being tested at Tenerife. Image Credit: Fernando Gandía/GMV
The craters on the Moon’s poles are in permanent shadow. But they’re also intriguing locations, due to deposits of water ice and other materials. The ESA is developing the idea for a rover that can explore these areas with power provided by lasers.
A future rover on Mars may include shape-shifting capabilities. This innovative tech won’t quite be like the liquid-metal polymorphing robot from “Terminator 2,” but will solve a problem that have plagued previous rovers: wheel wear and tear.
NASA’s Glenn Research Center is now using shape memory alloys (SMA) to build better wheels for driving on Mars.
The ESA has spent the past few years working towards the creation of an international lunar base, something that will serve as a spiritual successor to the International Space Station (ISS). To accomplish this, they have enlisted the help of other space agencies and contractors to develop concepts for space habitats and construction methods as well as ways to provide robotic and logistical support.
Recently, the ESA’s Technology Development Element (TDE) signed on with the French technology developer COMEX to create the TRAILER robotic system. This two-year project will test a new mission architecture where two rovers work in tandem (and with the help of astronauts) for the sake of exploring the lunar surface and building a permanent outpost on the Moon.
The climbing robot LEMUR rests after scaling a cliff in Death Valley, California. The robot uses special gripping technology that has helped lead to a series of new, off-roading robots that can explore other worlds.Credit: NASA/JPL-Caltech
NASA has pioneered the development of all kinds of robots and robotic systems. Beyond its0 orbiters and satellites, which have been exploring the planets and bodies of the Solar System for decades, there’s also the growing army of landers and rovers that have been exploring planetary surfaces. Aboard the ISS, they even have floating robots (like CIMON) and humanoid robot helpers – a la Robonaut and Robonaut 2.
Looking to the future, NASA hopes to build robots that can do even more. While the current generation of rovers can drive across the plains and craters of Mars, what if they could explore cliffs, polar ice caps and other hard-to-reach places? That is the purpose behind the Limbed Excursion Mechanical Utility Robot (LEMUR) that is currently being developed by engineers at NASA’s Jet Propulsion Laboratory.
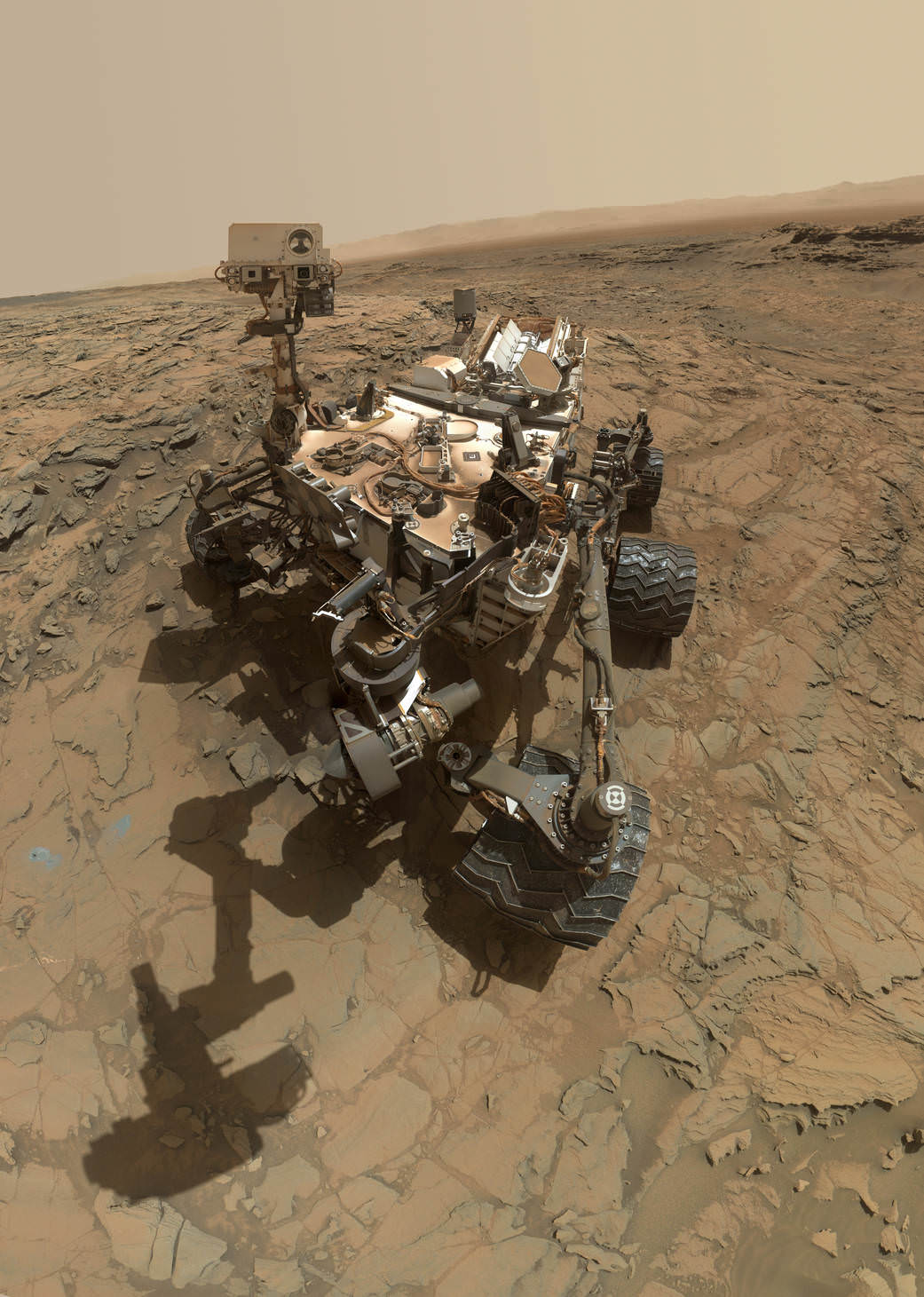
This self-portrait of NASA's Curiosity Mars rover shows the vehicle at the "Big Sky" site. Credit: NASA/JPL-Caltech/MSSS
Every time the Curiosity rover takes a ‘selfie’ on Mars, we get the same questions: “How was this picture taken?” “Why isn’t the rover’s arm or the camera visible in this picture?” “In all of Curiosity’s selfies, the camera mast is never visible… why?” And (sigh) “What is NASA hiding???”
The answer is simple and quite logical. Look any selfie image you’ve taken. Does your hand show up in the picture?
No, because it is behind the camera.
The same is true with the rover’s arm. For the most part, it is behind the camera, so it isn’t part of the picture. In your own selfies, if you’ve done a good job of positioning things, your arm doesn’t appear in the photo either. For example, take a look at this selfie taken last night by Astronomy Cast co-host Pamela Gay of her co-host (and Universe Today publisher) Fraser Cain, along with their fellow speakers at the Next Frontiers Symposium at Ohio State University.
You’ll notice Pamela’s arm isn’t showing, even though she took the picture of herself, just like the rover takes pictures of itself.
Just think of the rover’s arm as the ultimate interplanetary selfie stick. The best selfie-stick pictures are where the stick doesn’t show up in the image and it appears you had your own photographer. That’s what happens with the Curiosity rover self-portraits.
It’s important to note that while the rover selfies look like they are just one single image taken by the wide-angle camera on the rover, it is actually a series of individual images stitched together. The picture above is made from dozens of images the rover took of itself with the Mars Hand Lens Imager (MAHLI) camera at the end of the rover’s robotic arm. Curiosity moves its robotic arm around and over itself and the ground, taking pictures from every angle. These pictures are then stitched, just like panoramic images are put together to form a complete image of your total view. The rover’s arm isn’t long enough to make the camera’s field of view big enough to get the entire rover in one shot (similar to how it works if you hold your camera/phone close to your face you only get one feature, like your nose or eyes, not your entire body.)
Update: As for the questions of why the rover’s arm doesn’t show up in these rover selfie images, I conferred with Guy Webster from JPL and he said that portions of the arm do show up in some of the images used to create the selfie shots, but the portion of the arm pictured is very limited, and the team feels it would be even more confusing to include the small parts of the arm that are in some of the images and so have decided to leave it out entirely.
“Some of the component images do indeed show glimpses of the arm,” Webster said via email. “There’s selectivity in choosing which parts of which component frames to use in assembling the mosaic, to avoid having discontinuous bits of arm in the scene. That would cause confusion even quicker than making choices that leave out the arm.”
For example, here is one image from the series of pictures taken by the MAHLI to create the selfie, and it shows just a small piece of the arm, near the “shoulder”:
A small portion of the Curiosity rover’s robotic arm (the white ‘tube’ on the top left of the image) shows up in one of the original raw images used to create the montage ‘selfie.’ Credit: NASA/JPL-Caltech/MSSS.
You can see the entire collection of MAHLI images from Sol 1126 (Oct. 6, 2015) here. You can see how few images show parts of the arm, and how little of the arm shows up in the ones that do.
For the most part, though, because of the flexibility of the robotic arm and the way it is able to move, the arm ends up behind the camera. As Curiosity’s Engineering Camera Team Leader Justin Maki explains in the video below, “The rover is imaging the deck while the arm is behind the camera, and then to image the ground … again the arm is behind the camera when taking these pictures. When we stitch them all together, you don’t see the arm in any of the pictures.”
Click on the image to start the video (which shows very well why the arm isn’t in most of the shots):
It’s interesting to note, that while the lead image above — the latest rover selfie — does not include the rover’s robotic arm, the shadow of the arm is visible on the ground. You’ll notice there seems to be an extra “joint” in the arm, which is just part of the image editing, particularly the stacking of the images where the ground is, where the image editors used more than one image for that area. For the selfie image below, taken in 2012, the imaging team chose not to include any shadow of the arm.
A color self-portrait photo of Curiosity standing on Mars, on sol 84 (October 31, 2012). The photo is a mosaic of images shot with MAHLI, the camera on the end of the robotic arm. Credit: NASA/JPL/MSSS.
Why does the rover imaging team take these rover selfies? Are they just joining in on the selfie craze here on Earth?
These images are actually a great way for the rover team to look at all the components on Curiosity and make sure everything looks like it’s in good shape. The wheels are of particular interest because there has been some damage to them from driving over sharp rocks. These images also document various areas where the rover has worked, and often include things like the holes the rover has drilled into the Martian rocks and soil.
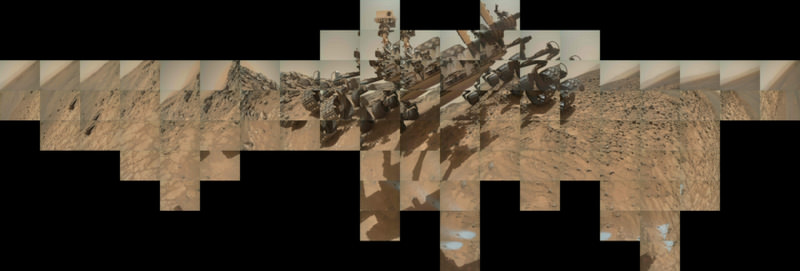
Emily Lakdawalla at The Planetary Society has written an extremely detailed post on how the rover takes self-portraits. She created this composite image of the 72 individual frames the Mars Hand Lens Imager (MAHLI) had to take in order to cover the 360-degree view showing the rover’s underside, a “belly selfie“:
Curiosity’s arm-mounted MAHLI camera took 72 individual photos over a period of about an hour in order to cover the entire rover and a lower hemisphere including 360 degrees around the rover and more than 90 degrees of elevation. It took 2 tiers of 20 images to cover the entire horizon, and fewer images at lower elevations to cover the bottom of the image sphere. The arm was kept out of most of the images but it was impossible to keep the arm’s shadow from falling on the ground in positions immediately in front of the rover. Credit: NASA/JPL/MSSS/Emily Lakdawalla.
Here’s another longer video from JPL that explains all the rover’s cameras.
A mosaic of images from NASA’s Curiosity rover shows what appears to be a “selfie” with a Martian mountain (Aeolis Mons)in the background. Credit: NASA/JPL-Caltech /MSS/ Image editing by Jason Major.
Have you heard the big news? NASA has reported that Mark Whatney is alive and well on the surface of Mars. No, wait, they’ve reported that there’s water on Mars. Didn’t they already report this? Today we’ll update you on the latest discovery and what this means for the search for life on Mars.