The first color reconstruction of the Moon by Adam Hurcewicz
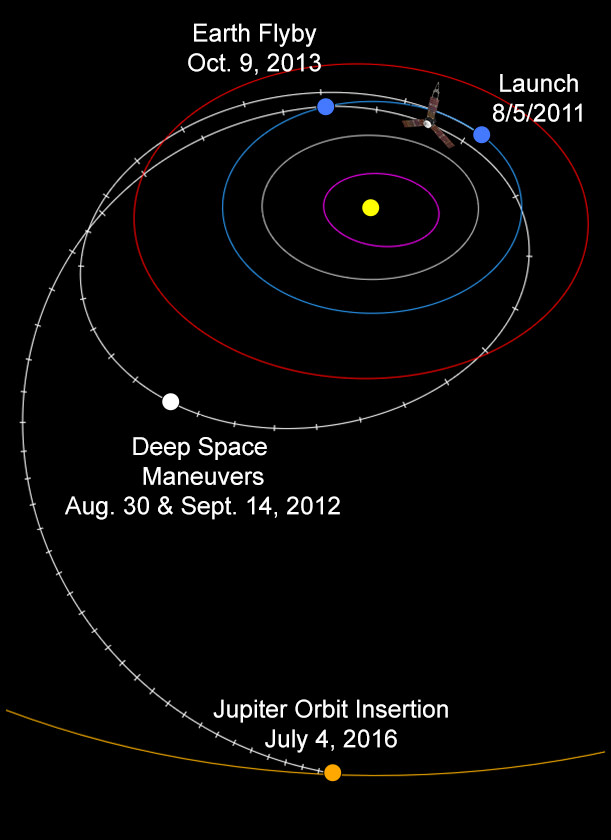
Developing story – NASA’s Juno-bound Jupiter orbiter successfully blazed past Earth this afternoon (Oct. 9) and gained its huge and critical gravity assisted speed boost that’s absolutely essential to reach the Jovian system in 2016.
However, Juno’s project manager Rick Nybakken told me moments ago that the Juno spacecraft unexpectedly entered ‘safe mode’ during the fly by maneuver and the mission teams are assessing the situation.
But the very good news is “Juno is power positive at this time. And we have full command ability,” said Nybakken in an exclusive phone interview with me.
“After Juno passed the period of Earth flyby closest approach at 12:21 PM PST [3:21 PM EDT] and we established communications 25 minutes later, we were in safe mode,” Nybakken told me. Nybakken is the Juno mission project manager at NASA’s Jet Propulsion Lab in Pasadena, CA.
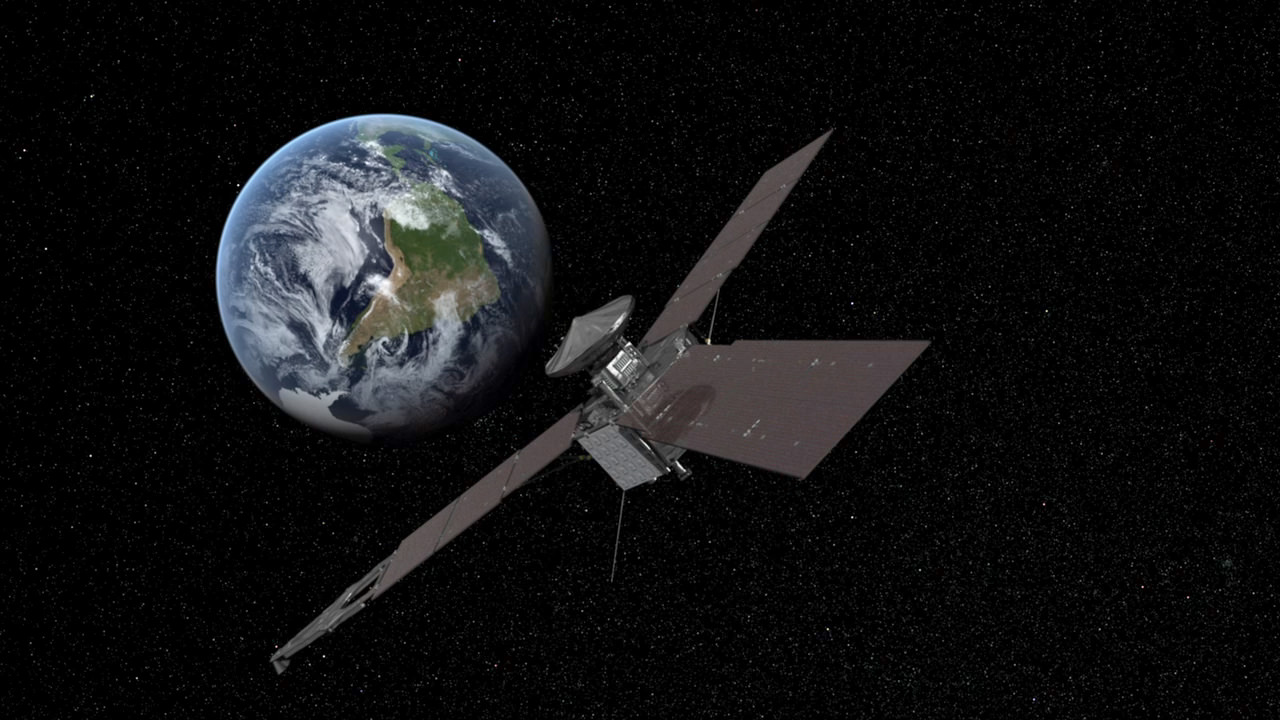
Furthermore, the Earth flyby did place the $1.1 Billion Juno spacecraft exactly on course for Jupiter as intended.
“We are on our way to Jupiter as planned!”
“None of this affected our trajectory or the gravity assist maneuver – which is what the Earth flyby is.”
Juno’s closest approach was over South Africa at about 500 kilometers (350 miles).
“Juno hit the target corridor within 2 km of the aim point,” Nybakken elaborated to Universe Today.
Juno needs the 16,330 mph velocity boost from the Earth swingby because the Atlas V launcher was not powerful enough to hurtle the 8000 pound (3267 kg) craft fast enough on a direct path to Jupiter.
And the team is in full radio contact with the probe. Safe mode is a designated protective state.
“Prior to the eclipse, which was a few minutes earlier than closest approach, the spacecraft was ‘nominal’. When we came out of the eclipse Juno was in safe mode,” Nybakken stated.
“We are going through safe mode diagnostics steps right now.”
“We have established full uplink and downlink. And we have full command ability of the spacecraft.”
First JunoCam image of the day! Taken at 11:07 UTC when Juno was 206,000 Kilometers from the Moon.
Speed boosting slingshots have been used on numerous planetary missions in the past
The spacecraft’s power situation and health is as good as can be expected.
“Juno is power positive at this time and sun pointed and stable. So we are very pleased about that,” Nybakken explained.
I asked if Juno had ever entered ‘safe mode’ before?
“We have never been in safe mode before. We are in a safe, stable state.”
“We are investigating this,” said Nybakken.
Credit: NASA/JPL
Today’s (Oct. 9) Earth flyby is the only time the spacecraft experiences an eclipse period during Juno’s entire five year and 1.7 Billion mile (2.8 Billion km) trek to Jupiter, the largest planet in our solar system.
When it finally arrives at Jupiter on July 4, 2016, Juno will become the first polar orbiting spacecraft at the gas giant.
NASA’s Juno spacecraft blasted off atop an Atlas V rocket two years ago from Cape Canaveral Air Force Station, FL, on Aug. 5, 2011 on a journey to discover the genesis of Jupiter hidden deep inside the planet’s interior.
Juno soars skyward to Jupiter on Aug. 5, 2011 from launch pad 41 at Cape Canaveral Air Force Station at 12:25 p.m. EDT. View from the VAB roof. Credit: Ken Kremer/kenkremer.comThe science team had also hoped to use the on board JunoCam imager to make a cool and unprecedented movie of Earth as it approached from the sunlit side – showing the passage as though you were a visitor from outer space.
I had an inkling that something might be amiss this afternoon when no images of Earth appeared on the Juno mission website.
So I asked the status.
“We don’t know yet if any images of Earth were collected. We hope to know soon.”
Juno flew past the Moon before the gravity assist slingshot with Earth. And it did manage to successfully capture several lunar images. See the images herein.
Read more about Juno in my flyby preview story – here.
Note: Due to the continuing chaos resulting from the US government partial shutdown caused by gridlocked politico’s in Washington DC, NASA public affairs remains shut down and is issuing no official announcements on virtually anything related to NASA! This pertains to Juno’s flyby, LADEE’s lunar arrival on Oct. 6, MAVEN’s upcoming launch in November, Cygnus at the ISS, and more!
Stay tuned here for continuing Juno, LADEE, MAVEN and more up-to-date NASA news.
Animation of Iapetus briefly blocking a distant bright object. (NASA/JPL-Caltech/SSI. Assembled by Jason Major.)
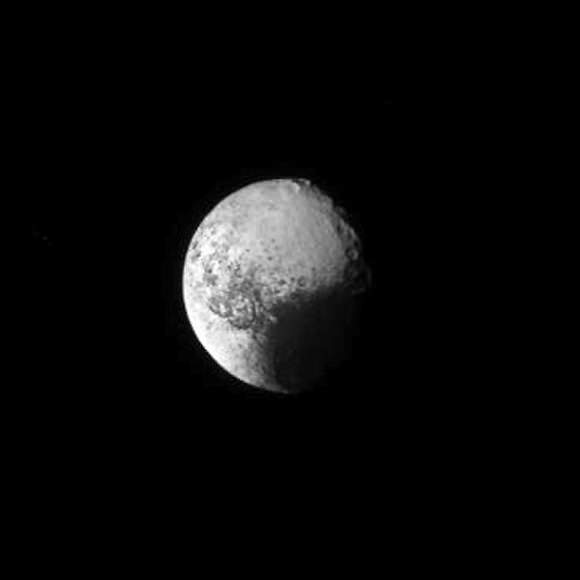
It’s a cosmic cover-up! No, don’t put your tinfoil* hats on, this isn’t a conspiracy — it’s just Saturn’s moon Iapetus drifting in front of the bright star Gamma Orionis (aka Bellatrix) captured on Cassini’s narrow-angle camera on August 10, 2013.
Such an event is called an occultation, a term used in astronomy whenever light from one object is blocked by another — specifically when something visually larger moves in front of something apparently smaller. (The word occult means to hide or conceal… nothing mystical implied!)
The animation above was assembled from 19 raw images publicly available on the JPL Cassini mission site, stacked in Photoshop and exported as a gif. They’ve been rotated 90º from the originals but otherwise they’re right from Cassini’s camera.
Iapetus, seen above as just a thin crescent, is best known for its two-toned appearance. One half of the 914-mile-wide moon is bright and icy, the other coated with a layer of dark reddish material, giving it a real “yin-yang” appearance. (Ok, I guess that’s a little mystical. But purely coincidental.)
The Tao of Iapetus (NASA/JPL-Caltech/SSI)
It’s thought that the dark material originates from a more distant moon, Phoebe, which is being pelted by micrometeorites and shedding its surface out into orbit around Saturn, which eventually gets scooped up by the backwards-orbiting Iapetus.
The difference in albedo affects how Iapetus absorbs solar radiation too, causing the water ice beneath the darker material to evaporate over the course of its 79-Earth-day rotation and migrate around its surface, creating a sort of positive feedback loop.
While neat to look at, occultations are important to science because they provide a way to briefly peer into a world’s atmosphere (or in a small moon’s case, exosphere). Watching how light behaves as it passes behind the limb of a planet or moon lets researchers learn details of the air around it — however tenuous — pretty much for free… no probes or flybys needed!
The occulted star above is Bellatrix, the 1.6-magnitude star that marks Orion’s left shoulder.
Iapetus orbits Saturn at the considerable distance of 2,212,889 miles (3,561,300 km). Learn more about Iapetus here, and as always you can find more fantastic Cassini images from Carolyn Porco’s team at the Space Science Institute in Boulder, Colorado at the CICLOPS site here.
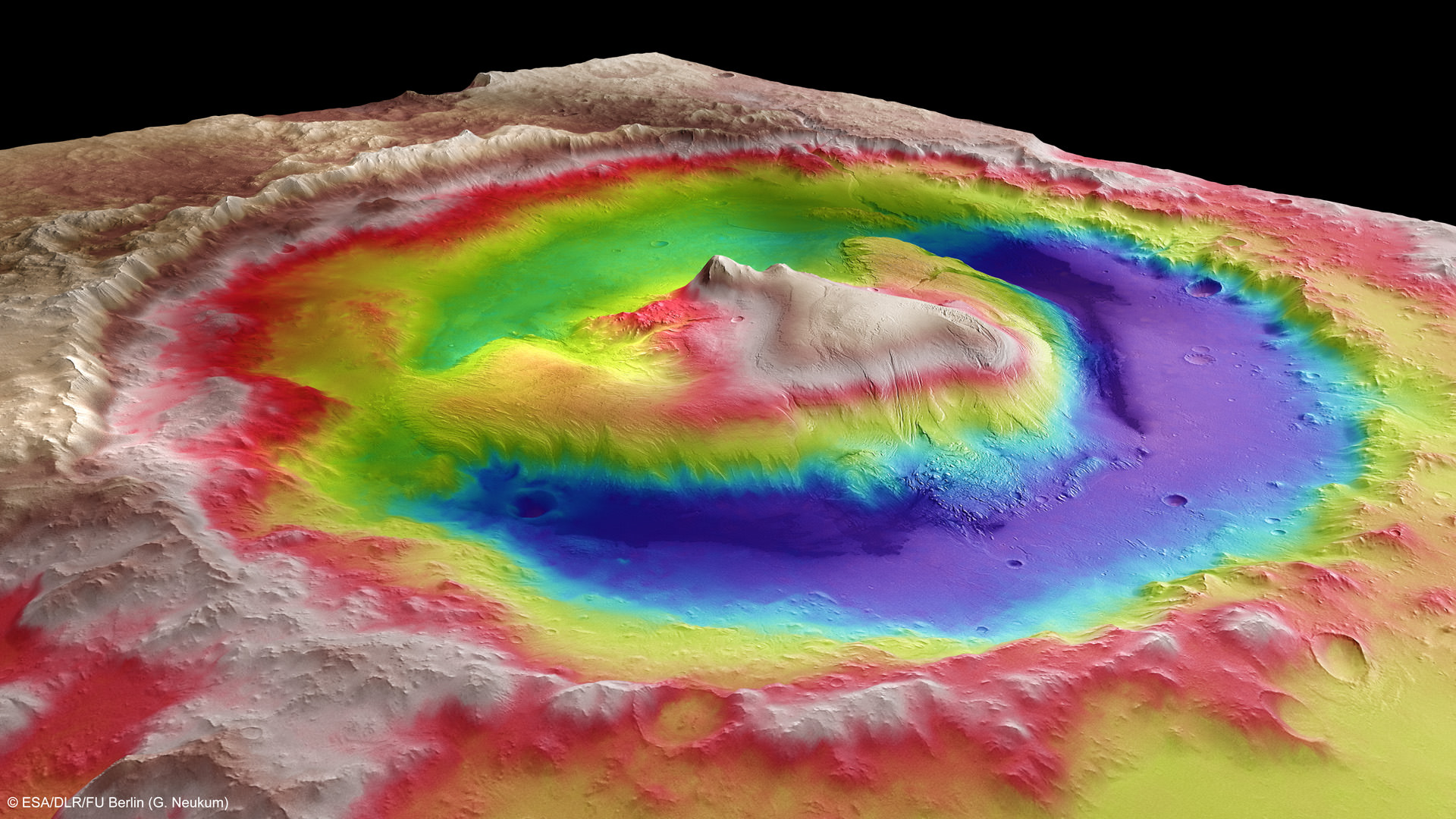
Mount Sharp inside Gale Crater - is the primary destination of NASA’s Curiosity rover mission to Mars. Curiosity landed on the right side of the mountain as shown here, near the dune field colored dark blue. Mount Sharp dominates Gale Crater. It is 3.4 mile (5.5 km) high. Gale Crater is 154 km wide. This image was taken by the High Resolution Stereo Camera (HRSC) of ESA’s Mars Express orbiter. Credit: ESA/DLR/FU Berlin (G. Neukum)
As NASA’s 1 ton Curiosity Mars rover sets out on her epic trek to the ancient sedimentary layers at the foothills of mysterious Mount Sharp, Universe Today conducted an exclusive interview with the Curiosity Project Manager Jim Erickson, of NASA’s Jet Propulsion Laboratory (JPL) to get the latest scoop so to speak on the robots otherworldly adventures.
The science and engineering teams are diligently working right now to hasten the rovers roughly year long journey to the 3.4 mile (5.5 km) high Martian mountain – which is the mission’s chief destination and holds caches of minerals that are key to sparking and sustaining life.
“We have departed Glenelg and the Shaler outcrop and started to Mount Sharp,” Erickson told me.
Mount Sharp lies about 5 miles (8 kilometers) distant – as the Martian crow flies.
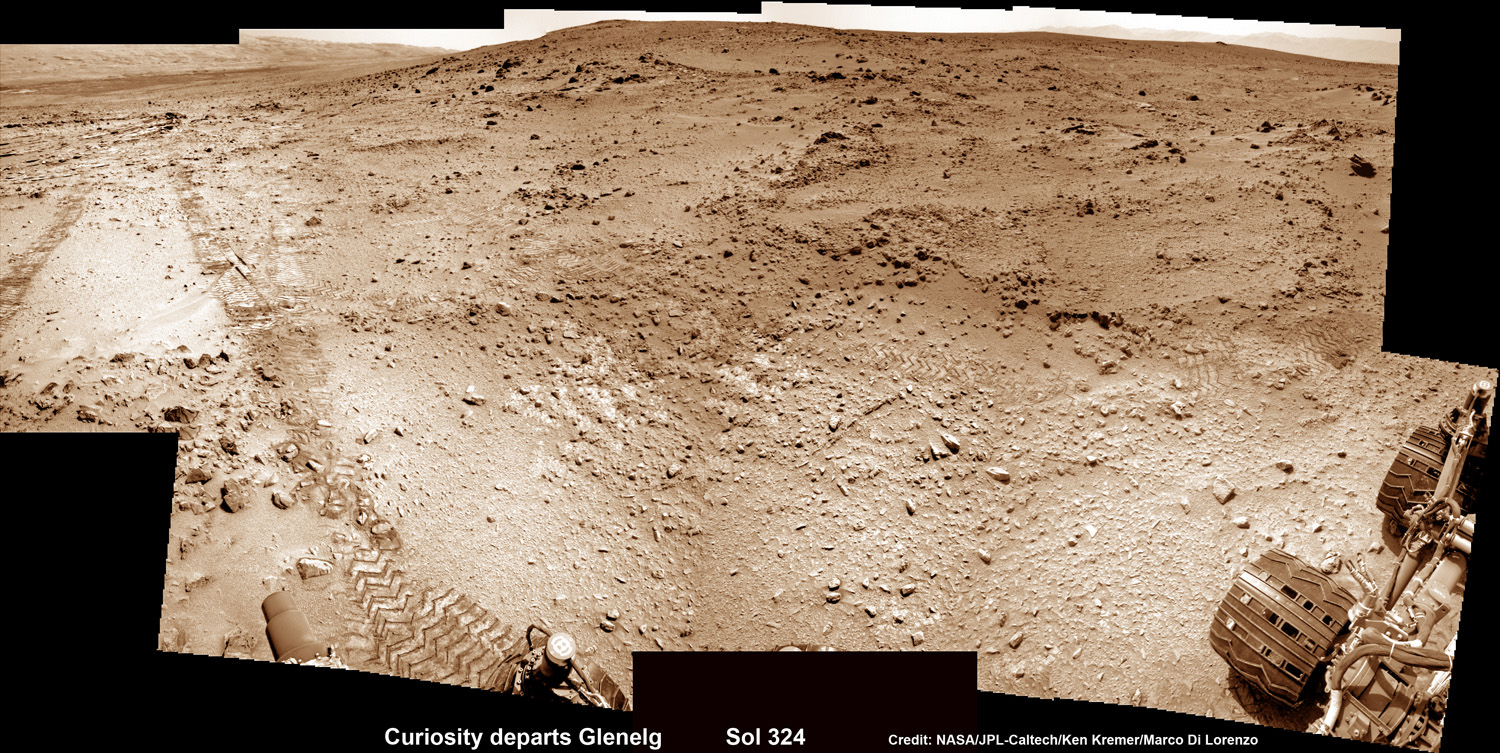
Curiosity Sets Sail for Mount Sharp
This photomosic shows NASA’s Curiosity departing at last for Mount Sharp- her main science destination. Note the wheel tracks on the Red Planet’s surface. The navcam camera images were taken on July 4, 2013 (Sol 324). Credit: NASA/JPL-Caltech/Ken Kremer (kenkremer.com)/Marco Di Lorenzo
Curiosity will have to traverse across potentially treacherous dune fields on the long road ahead to the layered mountain.
“Things are going very well and we have a couple of drives under our belt,” said Erickson.
Curiosity just completed more than half a year’s worth of bountiful science at Glenelg and Yellowknife Bay where she discovered a habitable environment on the Red Planet with the chemical ingredients that could sustain Martian microbes- thereby already accomplishing the primary goal of NASA’s flagship mission to Mars.
Curiosity’s handlers are upgrading the rovers ‘brain’ with new driving software, making her smarter, more productive and capable than ever before, and also far more independent since her breathtaking touchdown inside Gale Crater nearly a year ago on Aug. 6, 2012.
“We continue to drive regularly. The next drive is planned tomorrow and will be executed the following day.”
As of today (Sol 336, July 17), Curiosity has driven six times since leaving Glenelg on July 4 (Sol 324), totaling more than 180 meters.
Curiosity’s Traverse Map Through Sol 333
This map shows the route driven by NASA’s Mars rover Curiosity through Sol 333 of the rover’s mission on Mars (July 14, 2013). Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 200 meters (656 feet). From Sol 331 to Sol 333, Curiosity had driven a straight line distance of about 45.05 feet (13.73 meters). The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter. Credit: NASA/JPL-Caltech/Univ. of Arizona
Scientists specifically targeted Curiosity to Gale Crater and Mount Sharp because it is loaded with deposits of clay minerals that form in neutral water and that could possibly support the origin and evolution of simple Martian life forms, past or present.
Erickson has worked in key positions on many NASA planetary science missions dating back to Viking. These include the Galileo mission to Jupiter, both MER rovers Spirit & Opportunity, as well as a stint with the Mars Reconnaissance Orbiter (MRO).
Here is Part 1 of my wide ranging conversation with Jim Erickson, Curiosity Project Manager of JPL. Part 2 will follow.
I asked Erickson to describe the new driving software called autonomous navigation, or autonav, and how it will help speed Curiosity on her way. Until now, engineers on Earth did most of the planning for her.
Jim Erickson: We have put some new software – called autonav, or autonomous navigation – on the vehicle right after the conjunction period back in March 2013. This will increase our ability to drive.
The reason we put it on-board is that we knew it would be helpful when we started the long drive to Mount Sharp. And we are itching to check that out. Over the next few weeks we will be doing various tests with the autonav.
Ken Kremer: How will autonav help Curiosity?
Jim Erickson: The rover will have the ability to understand how far it’s driving, whether its slipping or not, and to improve safety.
And then the next step will be in effect to allow the rover to drive on its own.
Ken: How often will Curiosity drive?
Jim Erickson: Somewhere like every other day or so. We plan a drive, see how it goes and whether it went well and then we move further to the next drive. We are implementing that as it stands while we do the checkouts of autonav.
We might have to stop driving for part of the autonav checkout to complete the testing.
Basically we are limited mainly by the amount of days that we have successful completion of the previous day’s drive. And whether we have the information come back down [to Earth] so that we can plan the next day’s drive.
In some circumstances Mars time can rotate so that we don’t get the data back in time, so therefore we won’t be driving that day.
Ken: Can you ever drive two days in a row?
Jim Erickson: Yes we can, if the timing is right. If we get the results of the day’s drive (n) in time before we have to plan the next day’s drive (n+1) – almost as if you’re on Mars time. Then that would work fine.
Also, when we get the autonav capability we can plan two days in row. One day of directed driving and the second day can be ‘OK here’s your target from wherever you end up, try and go to this spot’.
This will increase the productivity!
Ken: When will autonav be up and running?
Jim Erickson: Something like two to three weeks. We need to thoroughly look at all the tests and validate them first so that we’re all comfortable with autonav.
Ken: What’s the Martian terrain on the floor of Gale crater like right now and for the next few miles?
Jim Erickson: It’s a mix of sand and different flagstone areas. As we get into it we’ll need to be able to drive comfortably on both. There aren’t too many large rocks that would be a problem right now. There is some shelf area that we’ll be going around.
Right now the area we’re in is actually a good thing to give us practice identifying obstacles and getting around them. This will help us later on when we see obstacles and want to be driving quicker.
Ken: What’s the overall plan now, a focus on driving or stopping and investigating?
Jim Erickson: – It’s not the intent to be stopping. This will be a good couple of weeks driving.
In Part 2 of my conversation with Jim Erickson we’ll discuss more about the rover’s traverse across alien territory that’s simultaneously a science gold mine and a potential death trap, as well as drilling and sampling activities, Comet ISON observations and upcoming science objectives.
Previous experience with rovers on Mars will be enormously helpful in studying how the rover interacts with dune fields. Autonav was first employed on the MER rovers.
The rover drivers and science team gained lots of experience and know how while driving both Spirit & Opportunity through numerous gigantic fields of dunes of highly varying composition and complexity.
NASA’s Curiosity rover reaches out in ‘handshake’ like gesture with dramatic scenery of Mount Sharp in the background. This mosaic of images was snapped by Curiosity on Sol 262 (May 2, 2013) and shows her flexing the robotic arm. Two drill holes are visible on the surface bedrock below the robotic arm’s turret. Credit: NASA/JPL-Caltech/Ken Kremer-(kenkremer.com)/Marco Di LorenzoCuriosity Route Map From ‘Glenelg’ to Mount Sharp
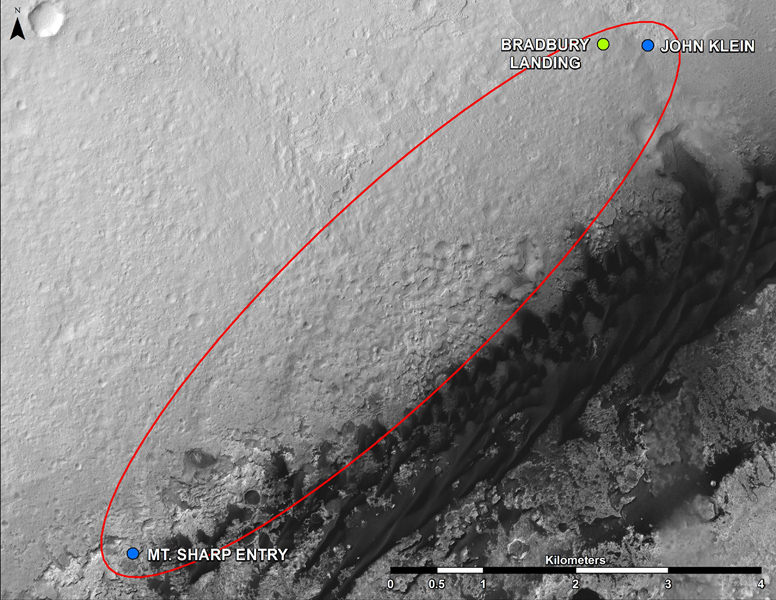
This map shows where NASA’s Mars rover Curiosity landed in August 2012 at “Bradbury Landing”; the area where the rover worked from November 2012 through May 2013 at and near the “John Klein” target rock in the “Glenelg” area; and the mission’s next major destination, the entry point to the base of Mount Sharp. Credit: NASA/JPL-Caltech/Univ. of Arizona
The bright spot in the center of this HiRISE image may be the 11-meter-wide parachute from Mars 3's descent stage (NASA/JPL-Caltech/Univ. of Arizona)
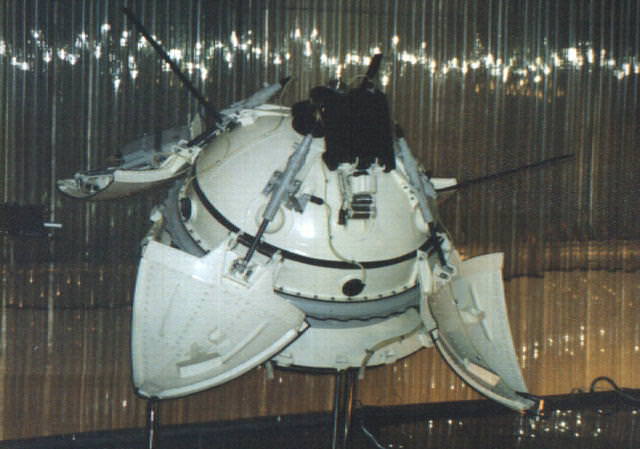
On May 28, 1971, the Soviet Union launched the Mars 3 mission which, like its previously-launched and ill-fated sibling Mars 2, consisted of an orbiter and lander destined for the Red Planet. Just over six months later on December 2, 1971, Mars 3 arrived at Mars — five days after Mars 2 crashed. The Mars 3 descent module separated from the orbiter and several hours later entered the Martian atmosphere, descending to the surface via a series of parachutes and retrorockets. (Sound familiar?) Once safely on the surface, the Mars 3 lander opened its four petal-shaped covers to release the 4.5-kg PROP-M rover contained inside… and after 20 seconds of transmission, fell silent. Due to unknown causes, the Mars 3 lander was never heard from or seen again.
Until now.
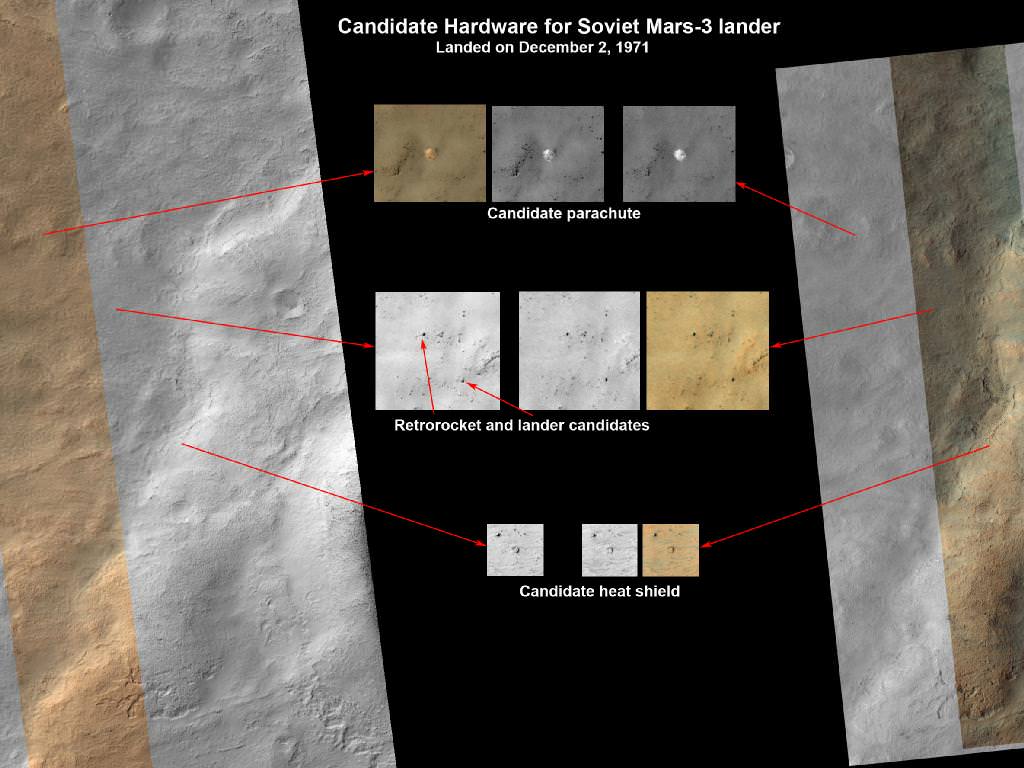
These images show what might be hardware from the Soviet Union’s 1971 Mars 3 lander (NASA/JPL-Caltech/Univ. of Arizona)
The set of images above shows what might be hardware from the 1971 Soviet Mars 3 lander, seen in a pair of images from the High Resolution Imaging Science Experiment (HiRISE) camera on NASA’s Mars Reconnaissance Orbiter.
While following news about Mars and NASA’s Curiosity rover, Russian citizen enthusiasts found four features in a five-year-old image from Mars Reconnaissance Orbiter that resemble four pieces of hardware from the Mars 3 mission: the parachute, heat shield, terminal retrorocket and lander. A follow-up image by the orbiter from last month shows the same features.
“Together, this set of features and their layout on the ground provide a remarkable match to what is expected from the Mars 3 landing, but alternative explanations for the features cannot be ruled out.”
– Alfred McEwen, HiRISE Principal Investigator
The Mars 3 lander (NSSDC)
Vitali Egorov from St. Petersburg, Russia, heads the largest Russian Internet community about Curiosity. His subscribers did the preliminary search for Mars 3 via crowdsourcing. Egorov modeled what Mars 3 hardware pieces should look like in a HiRISE image, and the group carefully searched the many small features in this large image, finding what appear to be viable candidates in the southern part of the scene. Each candidate has a size and shape consistent with the expected hardware, and they are arranged on the surface as expected from the entry, descent and landing sequence.
“I wanted to attract people’s attention to the fact that Mars exploration today is available to practically anyone,” Egorov said. “At the same time we were able to connect with the history of our country, which we were reminded of after many years through the images from the Mars Reconnaissance Orbiter.”
The predicted Mars 3 landing site was at latitude 45 degrees south, longitude 202 degrees east, in Ptolemaeus Crater. HiRISE acquired a large image at this location in November 2007, and promising candidates for the hardware from Mars 3 were found on Dec. 31, 2012.
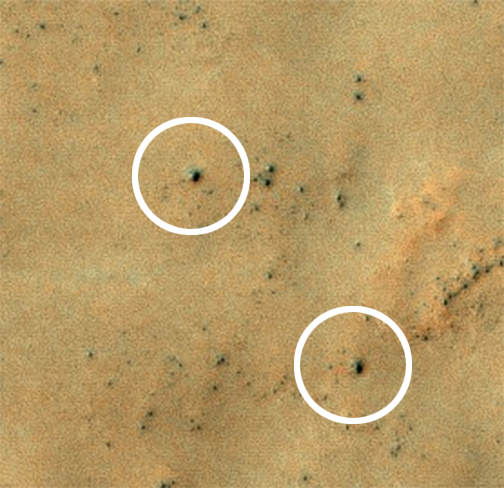
Candidate features of the Mars 3 retrorockets (top) and lander (bottom)
The candidate parachute is the most distinctive feature in the images (seen above at top.) It is an especially bright spot for this region, about 8.2 yards (7.5 meters) in diameter.
The parachute would have a diameter of 12 yards (11 meters) if fully spread out over the surface, so this is consistent.
“Together, this set of features and their layout on the ground provide a remarkable match to what is expected from the Mars 3 landing, but alternative explanations for the features cannot be ruled out,” said HiRISE Principal Investigator Alfred McEwen of the University of Arizona, Tucson. “Further analysis of the data and future images to better understand the three-dimensional shapes may help to confirm this interpretation.”
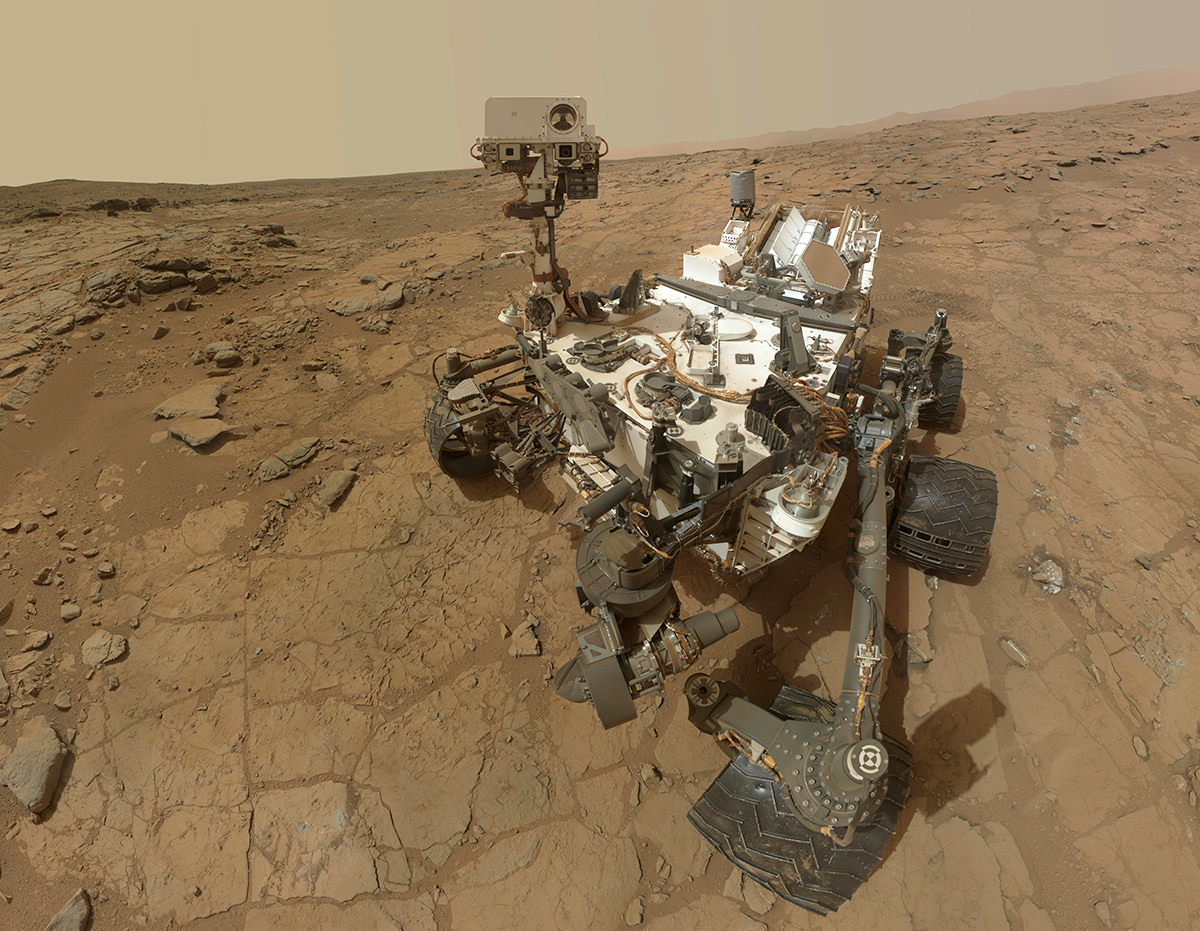
Mosaic self-portrait of Curiosity at the John Klein outcrop on Feb. 3, 2013 (NASA/JPL-Caltech/MSSS)
Although today Mars’ atmosphere is sparse and thin — barely 1% the density of Earth’s at sea level — scientists don’t believe that was always the case. The Red Planet likely had a much denser atmosphere similar to ours, long, long ago. So… what happened to it?
NASA’s Curiosity rover has now found strong evidence that Mars lost much of its atmosphere to space — just as many scientists have suspected. The findings were announced today at the EGU 2013 General Assembly in Vienna.
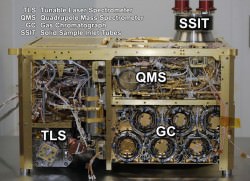
Curiosity’s SAM instrument (NASA/JPL-Caltech)
Curiosity’s microwave oven-sized Sample Analysis at Mars (SAM) instrument analyzed an atmosphere sample last week using a process that concentrates selected gases. The results provided the most precise measurements ever made of isotopes of argon in the Martian atmosphere.
Isotopes are variants of the same element with different atomic weights.
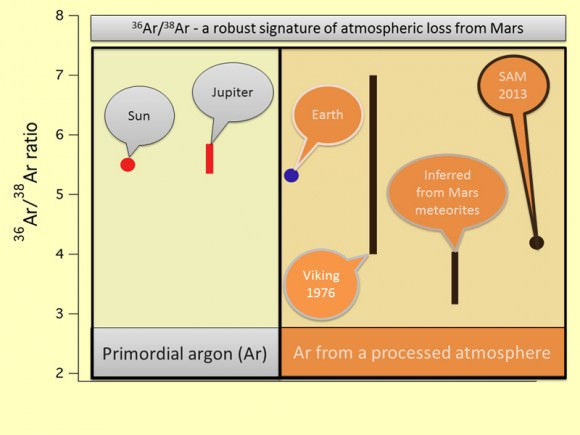
“We found arguably the clearest and most robust signature of atmospheric loss on Mars,” said Sushil Atreya, a SAM co-investigator at the University of Michigan.
SAM found that the Martian atmosphere has about four times as much of a lighter stable isotope (argon-36) compared to a heavier one (argon-38). This ratio is much lower than the Solar System’s original ratio, as estimated from measurements of the Sun and Jupiter.
The argon isotope fractionation provides clear evidence of the loss of atmosphere from Mars. (NASA/JPL)
This also removes previous uncertainty about the ratio in the Martian atmosphere in measurements from NASA’s Viking project in 1976, as well as from small volumes of argon extracted from Martian meteorites retrieved here on Earth.
These findings point to a process that favored loss of the lighter isotope over the heavier one, likely through gas escaping from the top of the atmosphere. This appears to be in line with a previously-suggested process called sputtering, by which atoms are knocked out of the upper atmosphere by energetic particles in the solar wind.
The solar wind may have helped strip Mars of its atmosphere over the course of many hundreds of millions of years (NASA)
Lacking a strong magnetic field, Mars’ atmosphere would have been extremely susceptible to atmospheric erosion by sputtering billions of years ago, when the solar wind was an estimated 300 times the density it is today.
These findings by Curiosity and SAM will undoubtedly support those made by NASA’s upcoming MAVEN mission, which will determine how much of the Martian atmosphere has been lost over time by measuring the current rate of escape to space. Scheduled to launch in November, MAVEN will be the first mission devoted to understanding Mars’ upper atmosphere.
Find out more about MAVEN and how Mars may have lost its atmosphere in the video below, and follow the most recent discoveries of the MSL mission here.
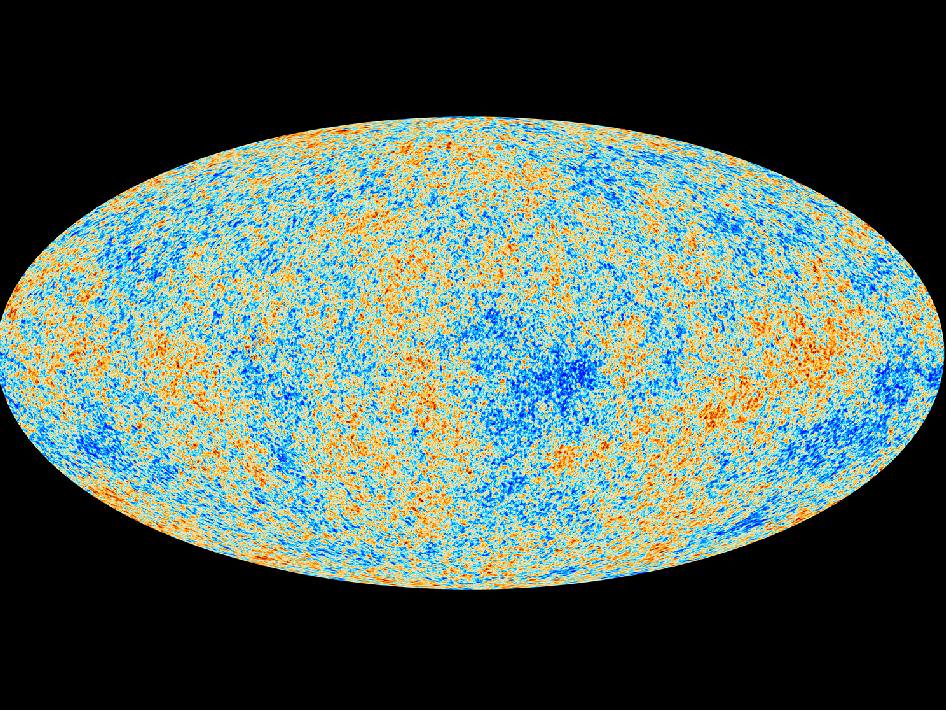
Like archaeologists sifting through the dust of ancient civilizations, scientists with the ESA Planck mission today showed a map of the oldest light in the Universe. The first cosmology results of the mission suggest our Universe is slightly older and expanding more slowly than previously thought.
Planck’s new estimate for the age of the Universe is 13.82 billion years.
The map also appears to show more matter and dark matter and less dark energy, a hypothetical force that is causing an expansion of the Universe.
“We are measuring the oldest light in the Universe, the cosmic microwave background,” says Paul Hertz, director of astrophysics with NASA. “It is the most sensitive and detailed map ever. It’s like going from standard television to a new high definition screen. The new details have become crystal clear.”
Overall, the cosmic background radiation, the afterglow of the Universe’s birth, is smooth and uniform. The map, however, provides a glimpse of the tiny temperature fluctuations that were imprinted on the sky when the Universe was just 370,000 years old. Scientists believe the map reveals a fossil, an imprint, of the state of the Universe just 10 nano-nano-nano-nano seconds after the Big Bang; just a tiny fraction of the time it took to read that sentence. The splotches in the Planck map represent the seeds from which the stars and galaxies formed.
The colors in the map represent different temperatures; red for warmer, blue for cooler. The temperature differences being only 1/100 millionth of a degree. “The contrast on the map has been turned way up,” says Charles Lawrence, the US project scientist for Planck at NASA’s Jet Propulsion Laboratory in Pasadena, Calif.
Planck, launched in 2009 from the Guiana Space Center in French Guiana, is a European Space Agency mission with significant contribution from NASA. The two-ton spacecraft gathers the ancient glow of the Universe’s beginning from a vantage more than 1 million miles from Earth.
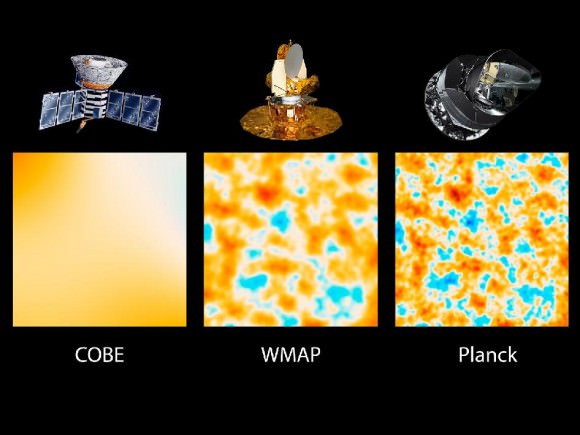
This graphic shows the evolution of satellites designed to measure the light left over from the Big Bang that created our Universe about 13.8 billion years ago. Called the cosmic background radiation, the light reveals information about the early Universe. The three panels show the same 10-square-degree patch of sky as seen by NASA’s Cosmic Background Explorer, or COBE, NASA’s Wilkinson Microwave Anisotropy Probe, or WMAP, and Planck. Planck has a resolution about 2.5 times greater than WMAP. Credit: NASA/JPL-Caltech/ESA
This is not the first map produced by Planck. In 2010, Planck produced an all-sky radiation map. Scientists, using supercomputers, have removed not only the bright emissions from foreground sources, like the Milky Way, but also stray light from the satellite itself.
As the light travels, matter scattered throughout the Universe with its associated gravity subtly bends and absorbs the light, “making it wiggle to and fro,” said Martin White, a Planck project scientist with the University of California, Berkeley and the Lawrence Berkeley National Laboratory.
“The Planck map shows the impact of all matter back to the edge of the Universe,” says White. “It’s not just a pretty picture. Our theories on how matter forms and how the Universe formed match spectacularly to this new data.”
“This is a treasury of scientific data,” said Krzysztof Gorski, a member of the Planck team with JPL. “We are very excited with the results. We find an early Universe that is considerably less rigged and more random than other, more complex models. We think they’ll be facing a dead-end.”
An artists animation depicting the “life” of a photon, or a particle light, as it travels across space and time from the beginning of the Universe to the detectors of the Planck telescope. Credit: NASA
Planck scientists believe the new data should help scientists refine many of the theories proposed by cosmologists that the Universe underwent a sudden and rapid inflation.
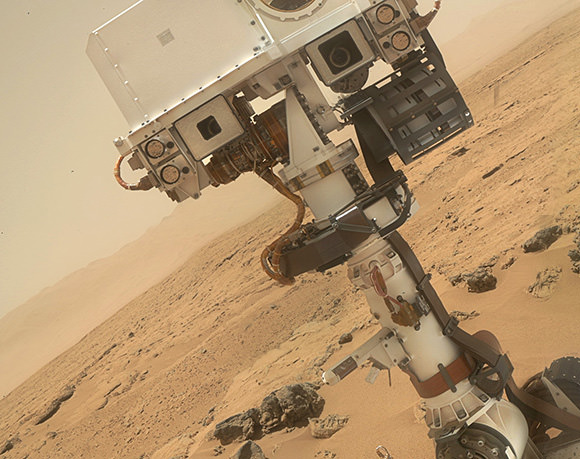
Not even two and a half weeks after a memory glitch that sent NASA’s Curiosity rover into a safe mode on Feb. 27, the robotic Mars explorer once again went into standby status as the result of a software discrepancy — although mission engineers diagnosed the new problem quickly and anticipate having the rover out of safe mode in a couple of days.
“This is a very straightforward matter to deal with,” said Richard Cook, project manager for Curiosity at Jet Propulsion Laboratory in Pasadena. “We can just delete that file, which we don’t need anymore, and we know how to keep this from occurring in the future.”
“Curiosity initiated this automated fault-protection action, entering ‘safe mode’ at about 8 p.m. PDT (11 p.m. EDT) on March 16, while operating on the B-side computer, one of its two main computers that are redundant to each other. It did not switch to the A-side computer, which was restored last week and is available as a back-up if needed. The rover is stable, healthy and in communication with engineers.
“The safe-mode entry was triggered when a command file failed a size-check by the rover’s protective software. Engineers diagnosed a software bug that appended an unrelated file to the file being checked, causing the size mismatch.”
The rover is stable, healthy and in communication with engineers.
– NASA’s Jet Propulsion Laboratory
Once Curiosity is back online its investigation into the watery history of Gale crater will resume, but another hiatus — this one planned — will commence on April 4, when Mars will begin passing behind the Sun from Earth’s perspective. Mission engineers will refrain from sending commands to the rover during a four-week period to avoid data corruption from solar interference.
Keep up with the latest news from the MSL mission here.
Then again, there’s a certain personality on Twitter who claims a slightly different reason for these recent setbacks…
Image caption: Curiosity will conduct Historic 1st drilling into Martian rock at this spot where the robotic arm is pressing down onto the Red Planet’s surface at the John Klein outcrop of veined hydrated minerals. The Alpha Particle X-Ray Spectrometer (APXS) is in contact with the ground. This panoramic photo mosaic of Navcam camera images was snapped on Jan. 25 & 26, 2013 or Sols 168 & 169 and shows a self-portrait of Curiosity dramatically backdropped with her ultimate destination- Mount Sharp. Credit: NASA/JPL-Caltech/Ken Kremer/Marco Di Lorenzo
The long awaited and history making first use of a drill on Mars is set to happen on Thursday, Jan. 31, 2013, or Sol 174, by NASA’sCuriosity Mars Science Lab (MSL) rover, if all goes well, according to science team member Ken Herkenhoff of the USGS.
Curiosity’s first drilling operation entails hammering a test hole into a flat rock at the location where the rover is currently parked at a scientifically interesting outcrop of rocks with veined minerals called ‘John Klein’. See our mosaics above & below illustrating Curiosity’s current location.
“Drill tailings will not be collected during this test, which will use only the percussion (not rotation) drilling mode,” says Herkenhoff.
Curiosity is an incredibly complex robot that the team is still learning to operate. So the plan could change at a moment’s notice.
The actual delivery of drill tailings to Curiosity’s CheMin and SAM analytical labs is still at least several days or more away and must await a review of results from the test drill hole and further drilling tests.
“We are proceeding with caution in the approach to Curiosity’s first drilling,” said Daniel Limonadi, the lead systems engineer for Curiosity’s surface sampling and science system at NASA’s Jet Propulsion Laboratory (JPL). “This is challenging. It will be the first time any robot has drilled into a rock to collect a sample on Mars.”
On Sol 166, Curiosity drove about 3.5 meters to reach the John Klein outcrop that the team chose as the 1st drilling site. The car sized rover is investigating a shallow depression known as ‘Yellowknife Bay’ – where she has found widespread evidence for repeated episodes of the ancient flow of liquid water near her landing site inside Gale Crater on Mars.
In anticipation of Thursday’s planned drilling operation, the rover just carried out a series of four ‘pre-load’ tests on Monday (Jan. 27), whereby the rover placed the drill bit onto Martian surface targets at the John Klein outcrop and pressed down on the drill with the robotic arm. Engineers then checked the data to see whether the force applied matched predictions.
“The arm was left pressed against one of them overnight, to see how the pressure changed with temperature,’ says Herkenhoff.
Image caption: Curiosity’s robotic arm places the robotic arm tool turret and Alpha Particle X-Ray Spectrometer (APXS) instrument on top of John Klein outcrop shown in this photo mosaic taken with the Mastcam 34 camera on Jan. 25, 2013, or Sol 168. The drill bit and prongs are pointing right on the tool turret. Credit: NASA/JPL-Caltech/MSSS/Ken Kremer/Marco Di Lorenzo
Because huge temperature swings occur on Mars every day (over 65 C or 115 F), the team needs to determine whether there is any chance of excessive stress on the arm while it is pressing the drill down onto the Martian surface. The daily temperature variations can cause rover systems like the arm, chassis and mobility system to expand and contact by about a tenth of an inch (about 2.4 millimeters), a little more than the thickness of a U.S. quarter-dollar coin.
“We don’t plan on leaving the drill in a rock overnight once we start drilling, but in case that happens, it is important to know what to expect in terms of stress on the hardware,” said Limonadi. “This test is done at lower pre-load values than we plan to use during drilling, to let us learn about the temperature effects without putting the hardware at risk.”
The high resolution MAHLI microscopic imager on the arm turret will take close-up before and after images of the outcrop target to assess the success of the drilling operation.
On Sol 175, another significant activity is planned whereby one of the ‘blank” organic check samples brought from Earth will be delivered to the SAM instrument for analysis as a way to check for any traces of terrestrial contamination of organic molecules and whether the sample handing system was successfully cleansed earlier in the mission at the Rocknest windblown sand ripple.
Meanwhile on the opposite side of Mars, NASA’s Opportunity rover starts Year 10 investigating never before touched phyllosilicate clay minerals that formed eons ago in flowing liquid water at Endeavour crater – detailed here.
Stay tuned for exciting results from NASA’s Martian sisters.
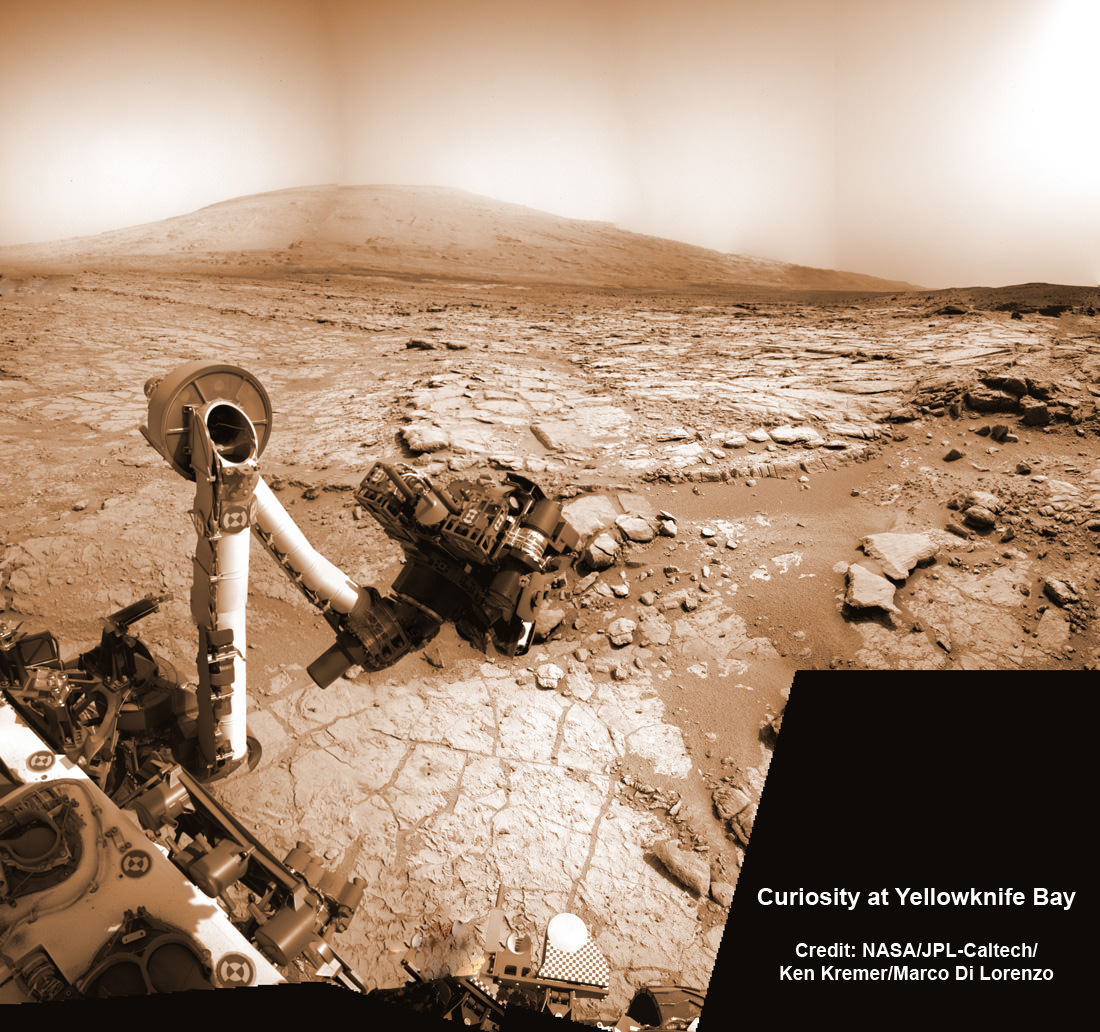
Image caption: View to Mount Sharp from Curiosity at Yellowknife Bay and John Klein outcrop. This photo mosaic was taken with the Mastcam 34 camera on Jan. 27, 2013, or Sol 170. Credit: NASA/JPL/MSSS/ Marco Di Lorenzo/Ken Kremer
Curiosity’s Drill in Place for Load Testing Before Drilling. The percussion drill in the turret of tools at the end of the robotic arm of NASA’s Mars rover Curiosity has been positioned in contact with the rock surface in this image from the rover’s front Hazard-Avoidance Camera (Hazcam). Credit: NASA/JPL-Caltech
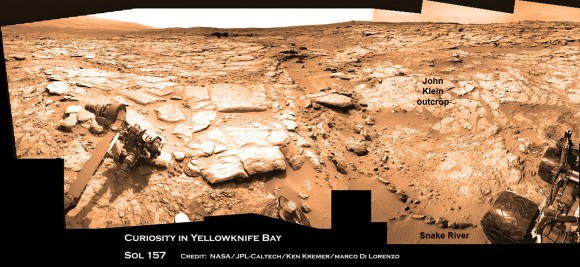
Image caption: Curiosity found widespread evidence for flowing water in the highly diverse, rocky scenery shown in this photo mosaic from the edge of Yellowknife Bay on Sol 157 (Jan 14, 2013) before driving to the John Klein outcrop at upper right. The rover then moved and is now parked at the flat rocks at the John Klein outcrop and is set to conduct historic 1st Martian rock drilling here on Jan. 31, 2013. ‘John Klein’ is filled with numerous mineral veins which strongly suggest precipitation of minerals from liquid water. Credit: NASA/JPL-Caltech/Ken Kremer/Marco Di Lorenzo
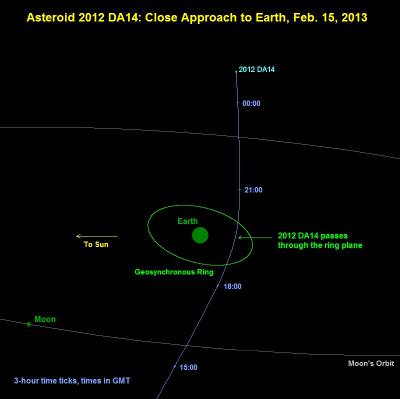
Asteroid 2012-DA14 will pass Earth closely on Feb. 15, 2013 (NASA)
On February 15 a chunk of rock about 50 meters wide will whiz by Earth at nearly 8 km/s, coming within 27,680 km of our planet’s surface — closer than many weather and communications satellites.
For those of you more comfortable with imperial units, that’s 165 feet wide traveling 17,800 mph coming within 17,200 miles. But regardless whether you prefer meters or miles, in astronomy that’s what’s called a close call.
Scientists stress that there’s no danger of an impact by this incoming asteroid, designated 2012-DA14, but it’s yet another reminder that in our neck of the Solar System we are definitely not alone.
“2012-DA14 will definitely not hit Earth,” says JPL’s near-Earth object specialist Don Yeomans. “The orbit of the asteroid is known well enough to rule out an impact.”
But with 2012-DA14’s upcoming February flyby Yeomans notes, “this is a record-setting close approach.”
The rocky asteroid will come within about 4 Earth radii, which is well within the orbits of geosynchronous satellites. During its closest approach at 19:26 UTC it should be visible in the sky to amateur telescopes (but not the naked eye), becoming as bright as an 7th- or 8th-magnitude star.
Radar observatories will be watching 2012-DA14 during the days leading up to and following its approach in an attempt to better determine its size, shape and trajectory. NASA’s Goldstone facility will have an eye — er, dish — on DA14, but it won’t be visible to Arecibo. Stay tuned for more info!
Read more about 2012-DA14 on the JPL Near-Earth Object Program page here.
Image Caption: Curiosity Scans ‘Yellowknife Bay’ on Sol 130. NASA’s Curiosity rover celebrated her 1st Christmas on the Red Planet at ‘Yellowknife Bay’ and is searching for her 1st rock target to drill into for a sample to analyze. She snapped this panoramic view on Dec. 17 which was stitched together from navigation camera (Navcam) images. Credit: NASA/JPL-Caltech/Ken Kremer/Marco Di Lorenzo
Today (Dec. 25) Curiosity celebrates her 1st Christmas on Mars at a spot called ‘Yellowknife Bay’. It’s Sol 138 and nearly 5 months since the pulse pounding landing on Aug. 6, 2012 inside Gale Crater. The robot is in excellent health.
Meanwhile her older sister Opportunity will soon celebrate an unfathomable 9 Earth years on Mars in a few short weeks on Jan. 24, 2013 – on the other side of the planet.
NASA’s Curiosity rover reached the shallow depression named ‘Yellowknife Bay’ on Sol 130 (Dec. 17, 2012) after descending about 2 feet (0.5 m) down a gentle slope inside a geologic feature dubbed ‘Glenelg’. See our panoramic mosaics from Yellowknife Bay – above and below for a context view.
The science team is searching for an interesting rock for the inaugural use of the high powered hammering drill.
According to a new report in SpaceRef, the drilling has been delayed due to concerns that frictional heating may potentially cause liquification of the rock to a gooey “Martian Honey” that could potentially clog and seriously damage the sample handling sieves and mechanisms. So the team is carefully re-evaluating the type of rock target and the drilling operation procedures before committing to the initial usage of the percussive drill located on the turret at the terminus of the robotic arm.
The team chose to drive to ‘Yellowknife Bay’ because it features a different type of geologic terrain compared to what Curiosity has driven on previously. The ‘Glenelg’ area lies at the junction of three different types of geologic terrain and is Curiosity’s first extended science destination.
Curiosity arrived at the lip of Yellowknife Bay on Sol 124 and entered the basin on Sol 125 (Dec. 12) and snapped a scouting panoramic view peering into the inviting locale. The rover is also using the APXS X-ray mineral spectrometer, ChemCam laser and MAHLI hand lens imager to gather initial science characterization data.
Curiosity peaks around Yellowknife Bay on Sol 125, Dec 12, 2012. The rover continued driving inside the basin in search of 1st rock drill target. Credit: NASA/JPL-Caltech/Ken Kremer/Marco Di Lorenzo
So far the rover has traversed a total driving distance of some 0.43 mile (700 meters).
Most of the science and engineering team is getting a much needed break to spend time with their families after uploading 11 Sols worth of activities ahead of time to keep the robot humming during the Christmas holiday season. A skeleton crew at JPL is keeping watch to deal with any contingencies.
One of the top priorities is acquiring a high resolution 360 degree Mastcam color panorama. This will be invaluable for selection of the very 1st rock target to drill into and acquire a sample from the interior – a feat never before attempted on Mars.
“We decided to drive to a place with a good view of the outcrops surrounding Yellowknife Bay to allow good imaging of these outcrops before the holiday break,” says rover science team member Ken Herkenhoff. “As the images are returned during the break, we can use them to help decide where to perform the first drilling operation.”
The team expects to choose a drill target sometime in January 2013 after a careful selection process.
The 7 foot (2 m) long robotic arm will deliver that initial, pulverized rock sample to inlet ports on the rover deck for analysis by the high powered duo of miniaturized chemistry labs named Chemin & SAM.
Image Caption: Curiosity deploys robotic arm on Sol 129 and examines rock with APXS and MAHLI science instruments to characterize rock and soil composition. This composite mosaic was stitched from Navcam images from Sol 129 (Dec. 16) and earlier sols- and shows the location of the Chemin sample inlet port on the rover deck. Credit: NASA/JPL-Caltech/Ken Kremer/Marco Di Lorenzo
Curiosity will spend at least another month or more investigating Glenelg before setting off on the nearly year long trek to her main destination – the sedimentary layers of the lower reaches of the 3 mile (5 km) high mountain named Mount Sharp.
Image caption: Scanning Mount Sharp from Yellowknife Bay on Sol 136. This photo mosaic assembled from Mastcam 100 camera images was snapped by Curiosity on Sol 136 (Dec. 23) – from her current location. It shows a portion of the layered mound called Mount Sharp, her main destination. Acquiring a 360 high resolution color panorama from Yellowknife Bay is a high priority task for the rover during the Christmas holiday season. Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer
As the Martian crow flies, the breathtaking environs of Mount Sharp are some 6 miles (10 km) away.
The mission goal is to search for habitats and determine if Mars ever could have supported microbial life in the past or present during the 2 year primary mission phase.
Image Caption: Curiosity Traverse Map, Sol 130. This map traces where Curiosity drove between landing at a site named “Bradbury Landing,” and the position reached during Sol 130 (Dec. 17, 2012) at a spot named “Yellowknife Bay” which is inside an area called “Glenelg”. The inset shows the most recent legs of the traverse in greater detail. Credit: NASA/JPL-Caltech/Univ. of Arizona










![PIA16716_ip[1]](https://www.universetoday.com/wp-content/uploads/2013/01/PIA16716_ip1-580x580.jpg)