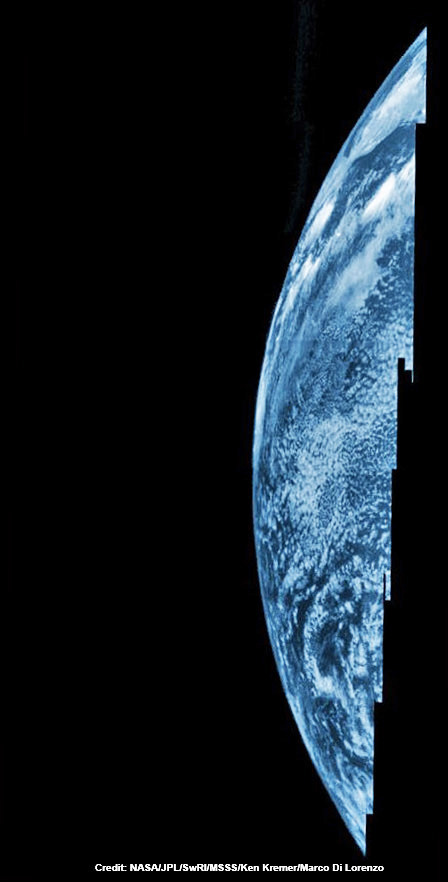
Photomosaic shows new holes and tears in several of rover Curiosity’s six wheels caused by recent driving over sharp edged Martian rocks on the months long trek to Mount Sharp. Raw images taken by the MAHLI camera on Curiosity’s arm on Dec. 22, 2013 (Sol 490) were assembled to show some recent damage to several of its six wheels – most noticeably the two here in middle and front. Credit: NASA / JPL / MSSS / Marco Di Lorenzo / Ken Kremer- kenkremer.com
See below complete 6 wheel mosaic and further wheel mosaics for comparison
[/caption]
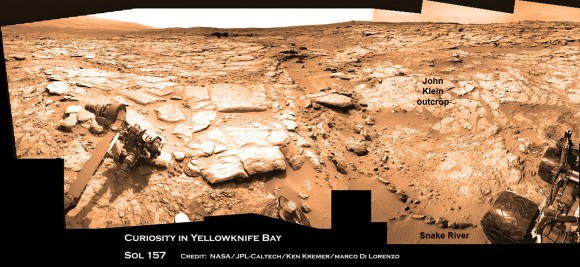
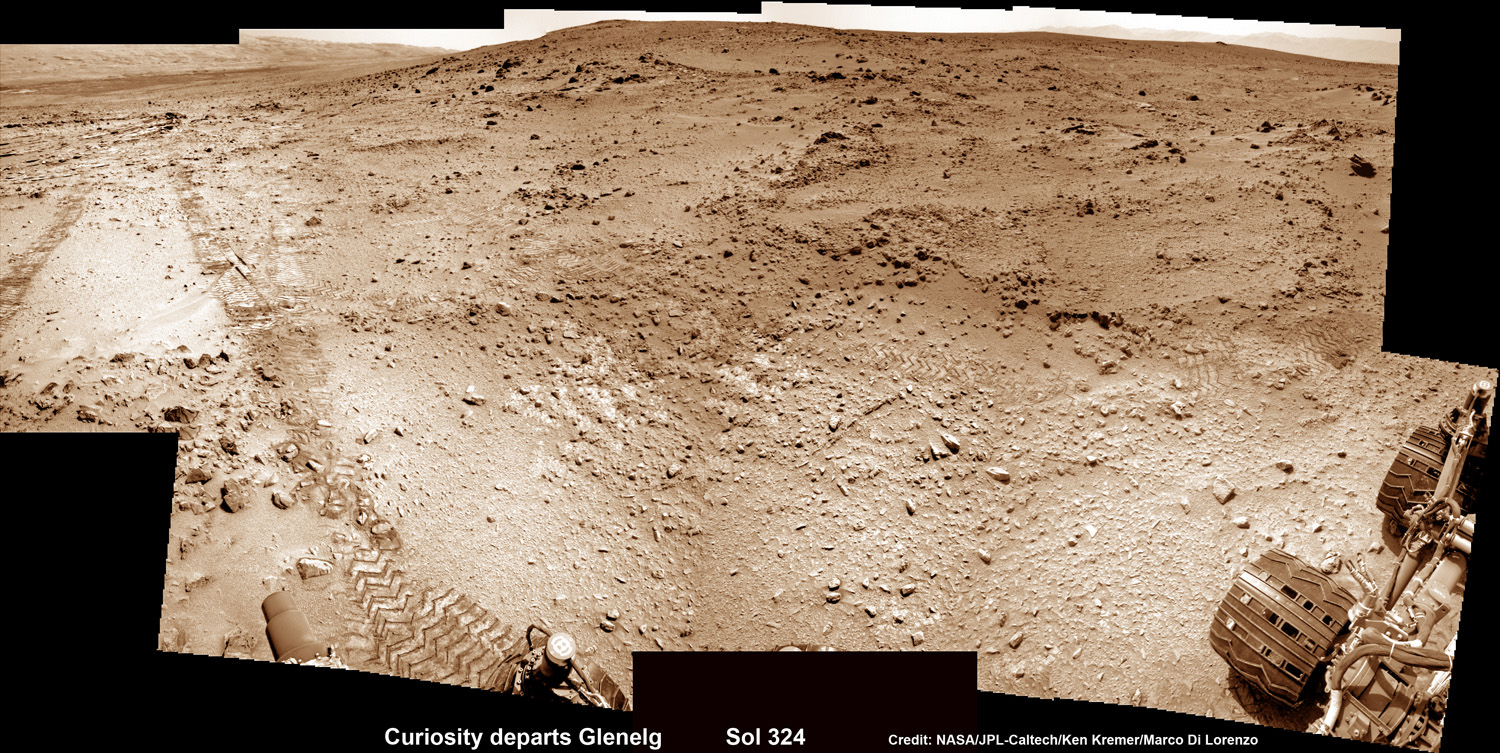
Rough edged rocks on the Red Planet are clearly taking their toll on rover Curiosity’s hi tech wheels as she speeds towards her ultimate goal – humongous Mount Sharp – in search of the ingredients necessary to sustain potential Martian microbes.
Several of the NASA rovers six big aluminum wheels have suffered some significant sized rips, tears and holes up to several centimeters wide – in addition to numerous dents – as she has picked up the driving pace across the rugged, rock filled Martian terrain this past fall and put over 4.5 kilometers (3 mi.) on the odometer to date.
It’s rather easy to spot the wheel damage to the 1 ton behemoth by examining the mosaic imagery we have created – See above and below – from newly transmitted raw imagery and comparing that to older imagery taken at earlier points in the mission. Check our Sol 177 wheels mosaic below.
The latest imagery from Mars captured just prior to Christmas is delivering an undesired holiday present of sorts to team members that might well cause the scientists and engineers to alter Curiosity’s extraterrestrial road trip to traverse smoother terrain and thereby minimize future harm.
So the wheel damage is certainly manageable at this point but will require attention.
The team of Marco Di Lorenzo and Ken Kremer have assembled the new Mastcam and MAHLI raw images of the wheels captured on Sol 490 (Dec. 22) into fresh color mosaics – shown herein.

See below more wheel mosaics for comparison

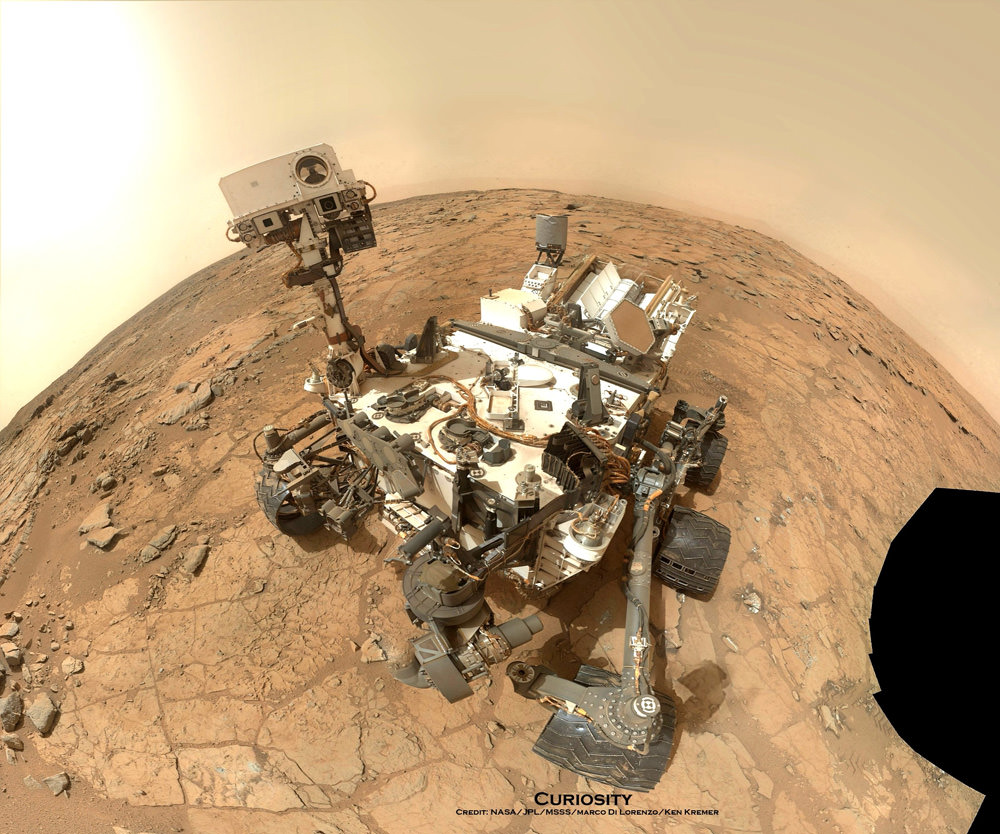
Indeed the rovers handlers have already directed the SUV sized Curiosity to snap close up images of the 20 inch diameter wheels with the high resolution color cameras located on the Mast as well as the Mars Hand Lens Imager (MAHLI) camera at the end of the rover’s maneuverable robotic arm.
“We want to take a full inventory of the condition of the wheels,” said Jim Erickson of NASA’s Jet Propulsion Laboratory, project manager for the NASA Mars Science Laboratory Project, in a NASA statement.

The rover team certainly expected some wear and tear to accumulate along the rock strewn path to the base of Mount Sharp – which reaches 5.5 km (3.4 mi) into the Martian sky.
But the volume of sharp edged rocks encountered in the momentous trek across the floor of Curiosity’s Gale Crater landing site apparently has picked up- as evidenced by the new pictures – and consequently caused more damage than the engineers anticipated.
“Dents and holes were anticipated, but the amount of wear appears to have accelerated in the past month or so,” Erickson noted.
“It appears to be correlated with driving over rougher terrain. The wheels can sustain significant damage without impairing the rover’s ability to drive. However, we would like to understand the impact that this terrain type has on the wheels, to help with planning future drives.”
The team is now inspecting the new imagery acquired of the wheels and will decide if a course alteration to Mount Sharp is in order.
The left front wheel may have suffered the most harm.

“Routes to future destinations for the mission may be charted to lessen the amount of travel over such rough terrain, compared to smoother ground nearby,” says NASA.
Following a new, post Christmas drive today, Dec. 26, 2013 (Sol 494) Curiosity’s odometer stands at 4.6 kilometers.
Curiosity has already accomplished her primary goal of discovering a habitable zone on Mars that could support Martian microbes if they ever existed.
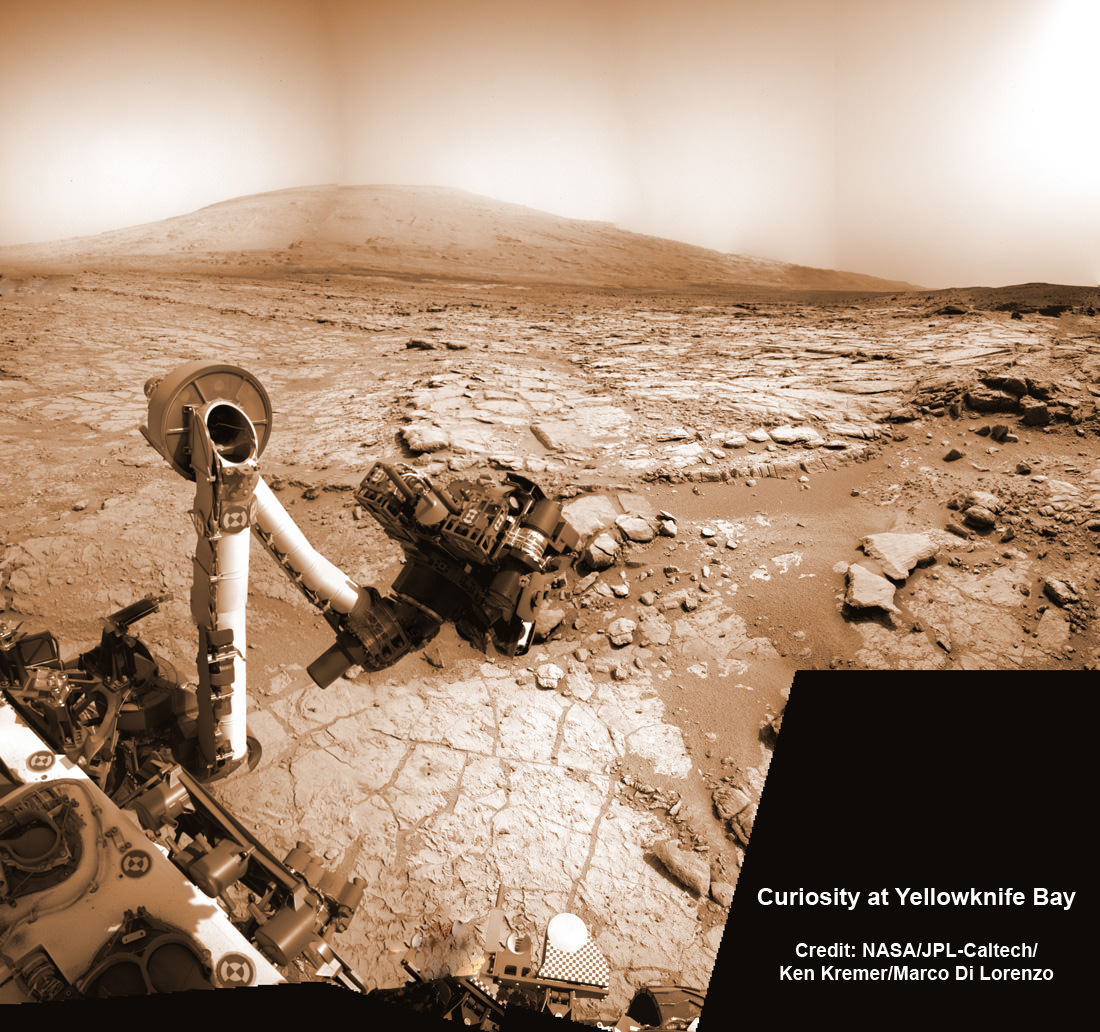
NASA’s rover Curiosity uncovered evidence that an ancient Martian lake had the right chemical ingredients that could have sustained microbial life forms for long periods of time – and that these habitable conditions persisted on the Red Planet until a more recent epoch than previously thought.
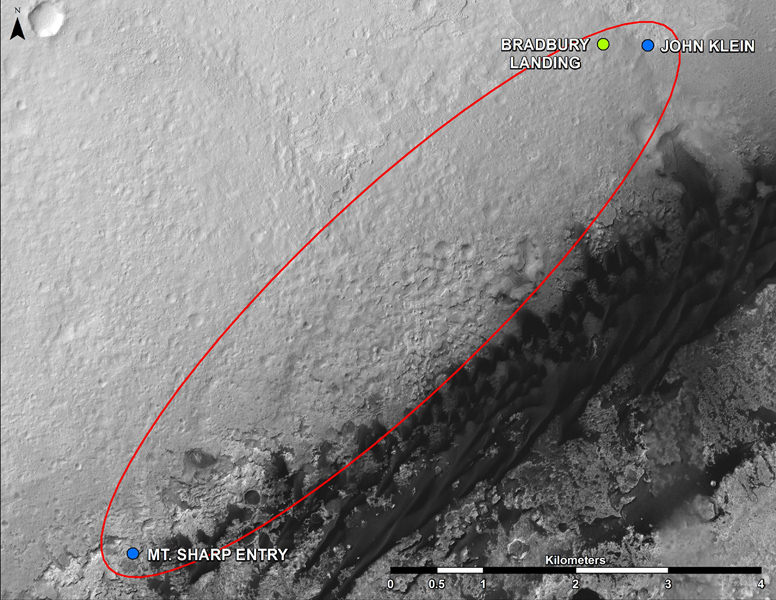
Right now the researchers are guiding Curiosity along a 10 km (6 mi) path to the lower reaches of Mount Sharp – which they hope to reach sometime in mid 2014.
Stay tuned here for Ken’s continuing Curiosity, Chang’e-3, LADEE, MAVEN, Mars rover and MOM news.










![PIA16716_ip[1]](https://www.universetoday.com/wp-content/uploads/2013/01/PIA16716_ip1-580x580.jpg)