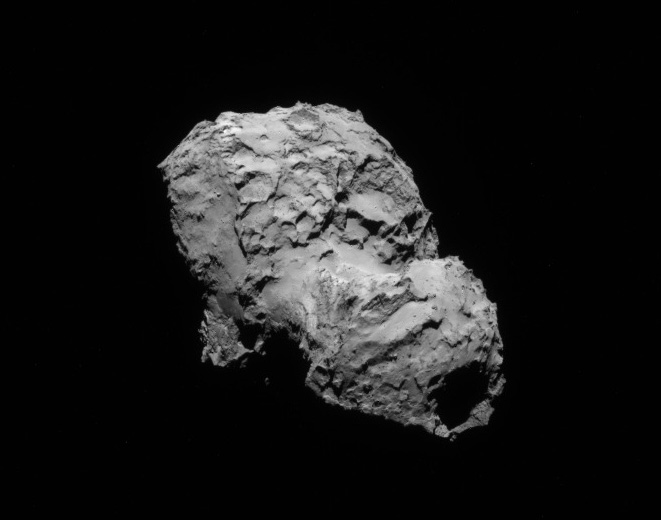
Where would you land here?
Newly released NAVCAM image taken by Rosetta on 5 August 2014 from a distance of about 145 km from comet 67P/Churyumov-Gerasimenko. Image has been rotated 180 degrees. Credit: ESA/Rosetta/NAVCAM[/caption]
Following the flawless and history making arrival of the European Space Agency’s (ESA) Rosetta spacecraft at its long sought destination of Comet 67P/Churyumov-Gerasimenko on Wednesday, Aug. 6, the goal of conducting ground breaking science at this utterly alien and bizarre icy wanderer that looks like a ‘Scientific Disneyland’ can actually begin.
Rosetta is the first spacecraft in history to rendezvous with a comet and enter orbit – after a more than 10 year chase of 6.4 billion kilometers (4 Billion miles) along a highly complex trajectory from Earth. The arrival event was broadcast live from mission control at ESA’s spacecraft operations centre (ESOC) in Darmstadt, Germany. Read my complete arrival story – here.
So what’s ahead for Rosetta? Another audacious and history making event – Landing on the comet!
A top priority task is also another highly complex task – ‘Finding a landing strip’ on the bizarre world of Comet 67P for the piggybacked Philae comet lander equipped with 10 science instruments.
“The challenge ahead is to map the surface and find a landing strip,” said Andrea Accomazzo, ESA Rosetta Spacecraft Operations Manager, at the Aug. 6 ESA webcast.
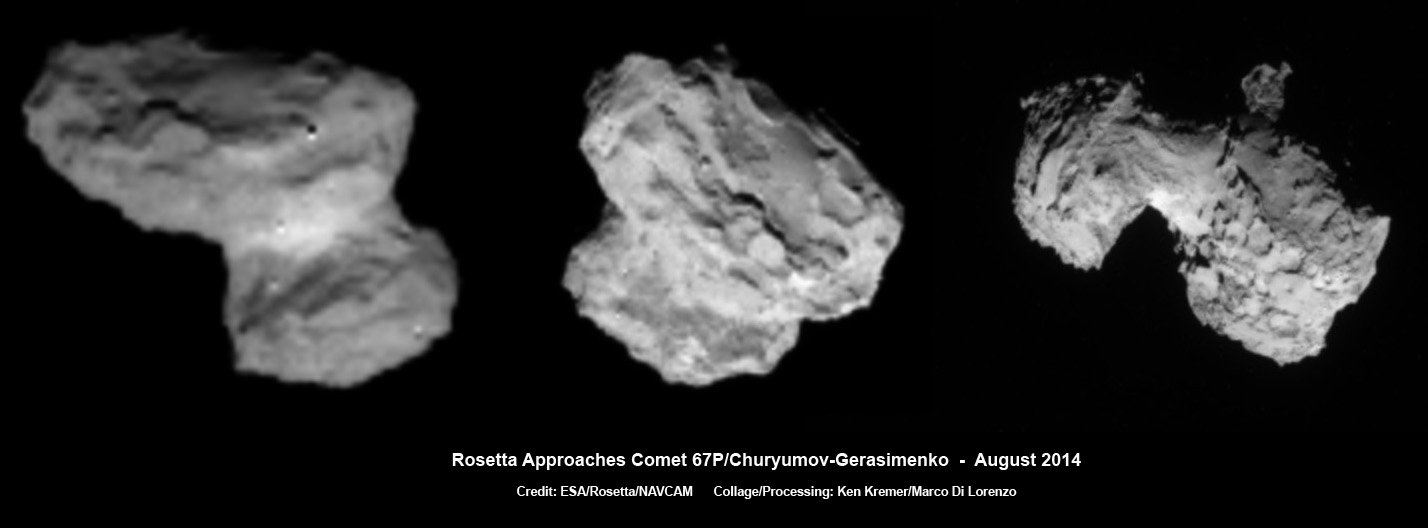
That will be no easy task based on the spectacular imagery captured by the OSIRIS high resolution science camera and the Navcam camera that has revealed an utterly wacky and incredibly differentiated world like none other we have ever visited or expected when the mission was conceived.
Magnificently detailed new navcam images were released by ESA today, Aug, 7, streaming back to Earth across some 405 million kilometers (250 million miles) of interplanetary space – see above and below.
The team will have its hand full trying to find a safe spot for touchdown.
“We now see lots of structure and details. Lots of topography is visible on the surface,” said Holger Sierks, principal investigator for Rosetta’s OSIRIS camera from the Max Planck Institute for Solar System Research in Gottingen, Germany, during the webcast.
“There is a big depression and 150 meter high cliffs, rubble piles, and also we see smooth areas and plains. It’s really fantastic”
“We see a village of house size boulders. Some about 10 meters in size and bigger and they vary in brightness. And some with sharp edges. We don’t know their composition yet,” explained Sierks.
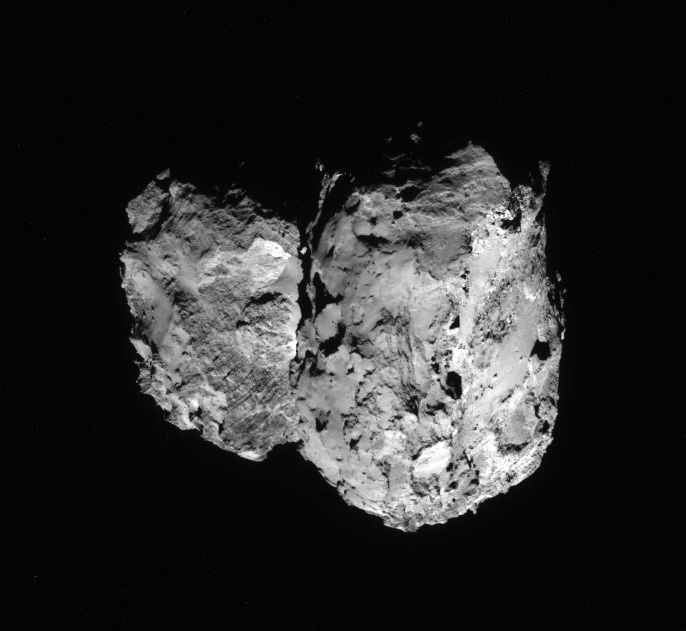
The key to finding a safe landing site for Philae will be quickly conducting a global comet mapping campaign with OSIRIS, Navcam and the remaining suite of 11 science instruments to provide a detailed scientific study of the physical characteristics and chemical composition of the surface.
They also need to determine which areas are hard or soft.

“Our first clear views of the comet have given us plenty to think about,” says Matt Taylor, ESA’s Rosetta project scientist.
“Is this double-lobed structure built from two separate comets that came together in the Solar System’s history, or is it one comet that has eroded dramatically and asymmetrically over time? Rosetta, by design, is in the best place to study one of these unique objects.”

Yesterday’s (Aug. 6) critical final thruster firing placed the 1.3 Billion euro robotic emissary from Earth into a triangular shaped orbit about 100 kilometers (62 miles) above and in front of the comet’s incredibly varied surface.
Therefore the initial mapping will be conducted from the 100 km (62 mi.) standoff distance.
Since the landing is currently targeted for November 11, 2014, in barely three months time there is not a moment to waste.
“Over the next few months, in addition to characterizing the comet nucleus and setting the bar for the rest of the mission, we will begin final preparations for another space history first: landing on a comet,” says Taylor.
The team will identify up to five possible landing sites by late August and expect to choose the primary site by mid-September.
Then the team has to plan and build the programming and maneuvers for the final timeline to implement the sequence of events leading to the nailbiting landing.
With Rosetta now travelling in a series of 100 kilometer-long (62 mile-long) triangular arcs in front of the comet lasting about 3 days each, it will also be firing thrusters at each apex.
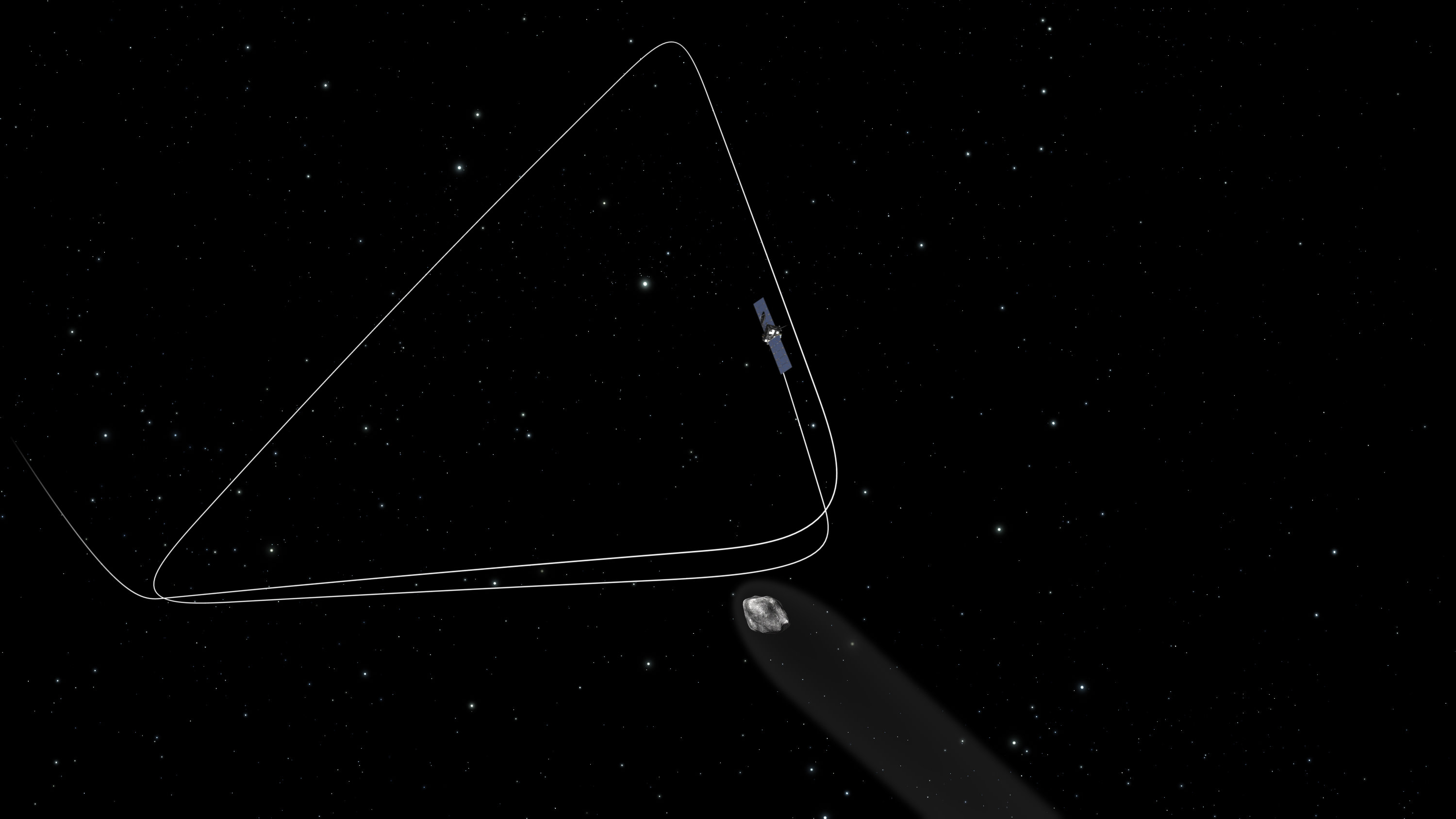
But it will also gradually edge closer over the next six weeks to about 50 km distance and then even closer to lower Rosetta’s altitude about Comet 67P until the spacecraft is captured by the comet’s gravity.
In November 2014, Rosetta will attempt another historic first when it deploys the Philae science lander from an altitude of just about 2.5 kilometers above the comet for the first ever attempt to land on a comet’s nucleus.
The three-legged lander will fire harpoons and use ice screws to anchor itself to the 4 kilometer (2.5 mile) wide comet’s surface. Philae will collect stereo and panoramic images and also drill into and sample its incredibly varied surface.
How will Philae land?
Stefan Ulamec, Philae Lander Manager from the German Aerospace Center (DLR) talked about the challenges of landing in a low gravity environment during the ESA webcast.
“The touchdown will be at a speed of just 1 m/s,” Ulamec explained. “This is like walking and bouncing against a wall.”
Details in an upcoming story!
Why study comets?
Comets are leftover remnants from the formation of the solar system. Scientists believe they delivered a vast quantity of water to Earth. They may have also seeded Earth with organic molecules.

Stay tuned here for Ken’s continuing Rosetta, Curiosity, Opportunity, Orion, SpaceX, Boeing, Orbital Sciences, commercial space, MAVEN, MOM, Mars and more Earth and Planetary science and human spaceflight news.
…….
Read my Rosetta series here:
Rosetta on Final Approach to Historic Comet Rendezvous – Watch Live Here
Rosetta Probe Swoops Closer to Comet Destination than ISS is to Earth and Reveals Exquisite Views
Rosetta Orbiter less than 500 Kilometers from Comet 67P Following Penultimate Trajectory Burn
Rosetta Closing in on Comet 67P/Churyumov-Gerasimenko after Decade Long Chase





















![MER10-SpiritAndOpportunity_ByTheNumbers[1]](https://www.universetoday.com/wp-content/uploads/2014/01/MER10-SpiritAndOpportunity_ByTheNumbers1.jpg)